

lokomotYVŲ elektros PaVarŲ PratYBŲ darBai - Vilniaus Gedimino ...
lokomotYVŲ elektros PaVarŲ PratYBŲ darBai - Vilniaus Gedimino ...
lokomotYVŲ elektros PaVarŲ PratYBŲ darBai - Vilniaus Gedimino ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
valdymo poveikiai formuojami koordinačių x, y sistemoje, besisukančioje<br />
sukamojo magnetinio lauko greičiu w 1<br />
, o pavaros parametrai<br />
matuojami ir reguliuojami fiksuotoje, su variklio statoriaus apvija<br />
susietoje nejudamoje a, b koordinačių sistemoje. Todėl, be įprastinių<br />
reguliatorių, šioje sistemoje reikalingi specialūs moduliai, leidžiantys<br />
perskaičiuoti valdymo parametrų reikšmes iš vienos koordinačių sistemos<br />
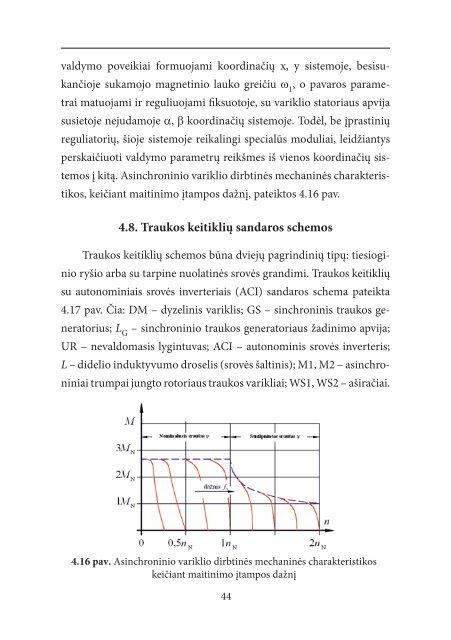
į kitą. Asinchroninio variklio dirbtinės mechaninės charakteristikos,<br />
keičiant maitinimo įtampos dažnį, pateiktos 4.16 pav.<br />
4.8. Traukos keitiklių sandaros schemos<br />
Traukos keitiklių schemos būna dviejų pagrindinių tipų: tiesioginio<br />
ryšio arba su tarpine nuolatinės srovės grandimi. Traukos keitiklių<br />
su autonominiais srovės inverteriais (ACI) sandaros schema pateikta<br />
4.17 pav. Čia: DM – dyzelinis variklis; GS – sinchroninis traukos generatorius;<br />
L G<br />
– sinchroninio traukos generatoriaus žadinimo apvija;<br />
UR – nevaldomasis lygintuvas; ACI – autonominis srovės inverteris;<br />
L – didelio induktyvumo droselis (srovės šaltinis); M1, M2 – asinchroniniai<br />
trumpai jungto rotoriaus traukos varikliai; WS1, WS2 – aširačiai.<br />
4.16 pav. Asinchroninio variklio dirbtinės mechaninės charakteristikos<br />
keičiant maitinimo įtampos dažnį<br />
44














