6 folier pr. side - NTNU
6 folier pr. side - NTNU
6 folier pr. side - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>NTNU</strong><br />
<strong>NTNU</strong><br />
<strong>NTNU</strong><br />
Slide 181<br />
Slide 183<br />
Slide 185<br />
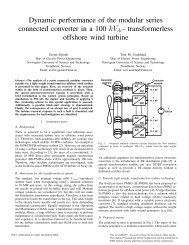
Udc+<br />
Udc-<br />
*opt*<br />
NPC<br />
*opt*<br />
Da 6<br />
Da 5<br />
���<br />
���<br />
���<br />
����<br />
���<br />
���<br />
���<br />
���<br />
���<br />
���<br />
����<br />
���<br />
���<br />
���<br />
����<br />
���<br />
���<br />
���<br />
����<br />
Tre-nivå trefase omformer<br />
Ta4<br />
Ta 3<br />
Ta 2<br />
Ta 1<br />
Da4<br />
Da3<br />
Da 2<br />
Da 1<br />
Db6<br />
Db5<br />
Tre-nivå trefase omformer<br />
������<br />
Tb4<br />
Tb3<br />
Tb2<br />
Tb1<br />
Db4<br />
Db3<br />
Db2<br />
Db1<br />
Dc 6<br />
Dc 5<br />
��� �à ����<br />
����<br />
��� �à ����<br />
����<br />
��� �à ����<br />
����<br />
��� �à ����<br />
����<br />
��� �à ����<br />
����<br />
��� ����� ���� ����� ����<br />
����<br />
����� ���� ����� ����<br />
���<br />
���<br />
���<br />
����<br />
���<br />
���<br />
���<br />
������<br />
��� �à ����<br />
����<br />
��� �à ����<br />
����<br />
���<br />
���<br />
���<br />
����<br />
���<br />
���<br />
���<br />
����<br />
���<br />
���<br />
���<br />
����<br />
��� �à ����<br />
����<br />
��� �à ����<br />
����<br />
��� �à ����<br />
����<br />
��� ����� ���� ����� ����<br />
����<br />
����� ���� ����� ����<br />
Kap.5: Likestrøms motordrifter<br />
Målet med kapittelet er at studenten:<br />
➨ skal kunne sette opp en dynamisk modell for<br />
likestrøms-motordriften<br />
➨ skal kunne utvikle en pu-modell<br />
➨ skal være i stand til å dimensjonere<br />
regulatorene i en slik motordrift<br />
➨ være i stand til å simulere den i Simulink<br />
➨ Forstå begrensningene med en ”middel-verdi”<br />
modell av omformerene<br />
Tc4<br />
Tc3<br />
Tc2<br />
Tc1<br />
Dc4<br />
Dc3<br />
Dc2<br />
Dc1<br />
Trondheim 2000<br />
a<br />
b<br />
Trondheim 2000<br />
Trondheim 2000<br />
c<br />
<strong>NTNU</strong><br />
<strong>NTNU</strong><br />
<strong>NTNU</strong><br />
Slide 182<br />
Slide 184<br />
Slide 186<br />
���<br />
���<br />
����<br />
�����<br />
�����<br />
�����<br />
�����<br />
���<br />
������<br />
���<br />
���<br />
���<br />
����<br />
Tre-nivå trefase omformer<br />
������<br />
����<br />
��� ����� ���� ����� ����<br />
����<br />
����� ���� ����� ����<br />
■ Modellering:<br />
➨ Motor modell<br />
➨ Omformer modell<br />
Synkronisert modulasjon<br />
Innhold<br />
➨ Transferfunksjon-modeller<br />
■ Stasjonære driftskarakteristikker<br />
■ Regulatorstrukturer:<br />
➨ PI-regulator<br />
➨ Tallverdi optimum<br />
➨ Symmetrisk optimum<br />
➨ Aktuelle funksjonsblokker i en motorstyring<br />
➨ Digitale regulatorer<br />
■ Dynamisk analyse av motordriften:<br />
➨ Moment- og strømregulering<br />
➨ Turtallsregulering<br />
➨ Posisjonsregulering<br />
➨ Estimeringsteknikker<br />
��� �à ����<br />
������<br />
������<br />
������<br />
��� �à ����<br />
�����<br />
��� �à ����<br />
�������<br />
Trondheim 2000<br />
Trondheim 2000<br />
Trondheim 2000