6 folier pr. side - NTNU
6 folier pr. side - NTNU
6 folier pr. side - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>NTNU</strong><br />
<strong>NTNU</strong><br />
<strong>NTNU</strong><br />
Slide 289<br />
Slide 291<br />
Slide 293<br />
u(s) q<br />
u(s) d<br />
u(s) f<br />
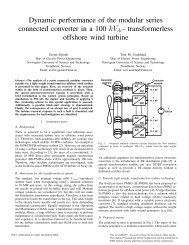
Spenningsmatet modell- fullstendig modell<br />
� ω�<br />
�<br />
�⋅ψ �<br />
�<br />
ψ q<br />
X X<br />
X<br />
� ⋅ψ<br />
�<br />
�<br />
ω�<br />
�<br />
r s<br />
G(s)<br />
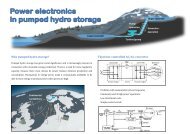
■ Modellering:<br />
r s<br />
�<br />
1<br />
� ( � ) �<br />
1<br />
� ( � ) �<br />
1+<br />
� ⋅ � �<br />
1+<br />
� ⋅ �<br />
�σ<br />
Innhold<br />
X<br />
ψd ⋅ iq<br />
ψ ⋅ q id<br />
� ��<br />
�<br />
� ⋅ �(�)<br />
1<br />
( � )<br />
➨ Fysikalsk motor modell og romvektorbegrepet<br />
➨ Transformerte modeller<br />
➨ Omformer modeller<br />
➨ Transferfunksjonsmodeller<br />
■ Stasjonære driftskarakteristikker<br />
➨ Separat magnetisert synkron maskin<br />
➨ Permanent Magnet synkron maskin<br />
■ Dynamisk analyse av motordriften:<br />
➨ Synkronmotordrift<br />
➨ Permanent Magnet synkron motordrift<br />
➨ Moment- og strømregulering<br />
➨ Turtallsregulering<br />
➨ Posisjonsregulering<br />
➨ Estimeringsteknikker<br />
�<br />
m L<br />
1<br />
� ⋅ ��<br />
Separat magnetisert synkron maskin<br />
■ Stasjonære forhold:<br />
u d = rs<br />
⋅ i d − n ⋅ ψ q<br />
ψ d = x d ⋅ i d + x ad ⋅ i f<br />
u q = rs<br />
⋅ i q + n ⋅ ψ d<br />
ψ q = x q ⋅ i q<br />
■ Satt inn for fluksforslyngninger:<br />
u = r ⋅ i − n ⋅ x ⋅ i<br />
d<br />
e<br />
s<br />
ad<br />
d<br />
f<br />
q<br />
q<br />
m = x ⋅ i ⋅ i + ( x − x ) ⋅ i ⋅ i<br />
■ Ved symmetrisk rotor: x s=x d=x q<br />
u = r ⋅ i + �⋅<br />
n ⋅ x ⋅ i + �⋅<br />
n ⋅ x ⋅ i<br />
s<br />
m = x ⋅ i ⋅ i ⋅ cos( δ − ϕ)<br />
e<br />
s<br />
ad<br />
s<br />
f<br />
s<br />
s<br />
q<br />
d<br />
s<br />
q<br />
q<br />
d<br />
q<br />
s<br />
q<br />
�<br />
n(s)<br />
i(s) d<br />
i(s) f<br />
Trondheim 2000<br />
Trondheim 2000<br />
u f = rf<br />
⋅ i f<br />
m e = ψ d ⋅ i q − ψ q ⋅ i d<br />
u = r ⋅ i + n ⋅ x ⋅ i + n ⋅ x ⋅ i<br />
ad<br />
f<br />
d<br />
hvor<br />
d<br />
ad<br />
x = x = x<br />
s<br />
d<br />
f<br />
q<br />
Trondheim 2000<br />
<strong>NTNU</strong><br />
<strong>NTNU</strong><br />
<strong>NTNU</strong><br />
i(s) q<br />
Slide 290<br />
Strømmatet modell- fullstendig modell<br />
ψ q<br />
m L<br />
X<br />
� me �<br />
X<br />
�<br />
ω<br />
ψ<br />
�<br />
i(s) d � ( �)<br />
�<br />
�<br />
X<br />
u(s) q<br />
u(s) f<br />
Up<br />
Um<br />
Slide 292<br />
Slide 294<br />
G(s)<br />
� ( �)<br />
�<br />
� ⋅ �(�)<br />
r s<br />
1 + � ⋅ � �<br />
1+<br />
� ⋅ � �σ<br />
� ��<br />
r s<br />
1<br />
( � )<br />
�<br />
ω�<br />
1<br />
� ⋅ �<br />
�<br />
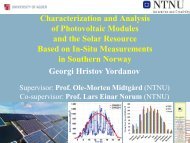
Frekvensomformer for spenningsmatede<br />
motorer<br />
■ Inngangstrinnet er en diodelikeretter eller tyristorbro<br />
■ For å kunne mate tilbake på nettet benyttes noen ganger antiparallelle<br />
tyristorlikeretter<br />
■ Aktiv front-end<br />
�<br />
�<br />
�<br />
�<br />
ÃÃÃÃÃÃ�Ã�����Ã<br />
���������������<br />
v Enable<br />
� �<br />
� ��<br />
�<br />
� �<br />
� �<br />
Udc+<br />
Udc-<br />
c1<br />
sw1_l4<br />
sw1_l4<br />
� � �<br />
� �<br />
� �<br />
��<br />
� �<br />
� ��<br />
δ<br />
pwld<br />
sw1_l4<br />
pwld sw1_l4<br />
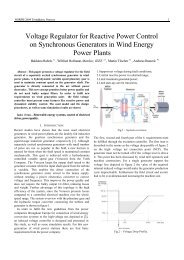
Romvektor-diagram<br />
�� �<br />
� ��<br />
��<br />
m = x ⋅ i ⋅ i ⋅ cos( δ − ϕ)<br />
�<br />
�<br />
u = r ⋅ i + �⋅<br />
n ⋅ x ⋅ i + �⋅<br />
n ⋅ x ⋅ i<br />
s<br />
e<br />
s<br />
ad<br />
s<br />
f<br />
s<br />
s<br />
s<br />
= u p<br />
ad<br />
f<br />
��<br />
� � � �<br />
pwld<br />
pwld<br />
�<br />
90 −ϕ<br />
�<br />
hvor<br />
sw1_l4<br />
sw1_l4<br />
� �<br />
� ��<br />
δ<br />
X<br />
�<br />
pwld<br />
pwld<br />
�<br />
n(s)<br />
i(s) f<br />
Trondheim 2000<br />
Trondheim 2000<br />
�� �<br />
� ��<br />
x = x = x<br />
s<br />
d<br />
ϕ<br />
−<br />
δ<br />
=<br />
ϕ p<br />
q<br />
Trondheim 2000