

KR C2 sr - KUKA Robotics
KR C2 sr - KUKA Robotics
KR C2 sr - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>KR</strong> <strong>C2</strong> <strong>sr</strong><br />
Unterbrechungen/<br />
Querschlüsse<br />
Unterbrechungen oder Querschlüsse, die Sicherheitsfunktionen betreffen und<br />
nicht durch die Robotersteuerung oder die SafeRDW erkannt werden, müssen<br />
entweder ausgeschlossen werden (z. B. baulich) oder kundenseitig erkannt<br />
werden (z. B. über eine SPS oder über eine Prüfung der Ausgänge).<br />
Empfehlung: Querschlüsse baulich ausschließen. Hierzu die Bemerkungen<br />
in EN ISO 13849-2, Tabelle D.5, D.6 und D.7 beachten.<br />
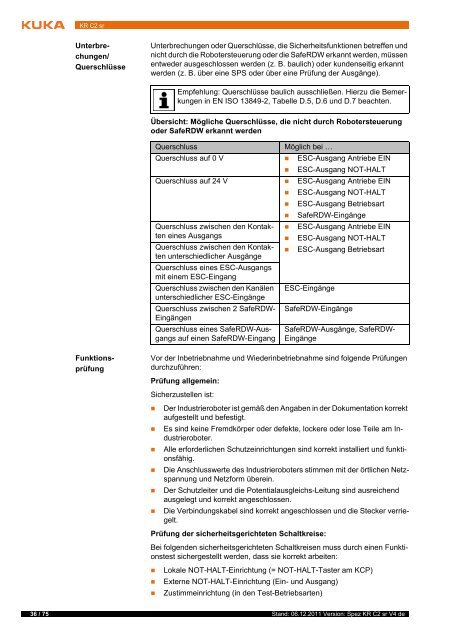
Übersicht: Mögliche Querschlüsse, die nicht durch Robotersteuerung<br />
oder SafeRDW erkannt werden<br />
Querschluss<br />
Möglich bei …<br />
Querschluss auf 0 V • ESC-Ausgang Antriebe EIN<br />
• ESC-Ausgang NOT-HALT<br />
Querschluss auf 24 V • ESC-Ausgang Antriebe EIN<br />
• ESC-Ausgang NOT-HALT<br />
• ESC-Ausgang Betriebsart<br />
• SafeRDW-Eingänge<br />
Querschluss zwischen den Kontakten<br />
• ESC-Ausgang Antriebe EIN<br />
eines Ausgangs<br />
• ESC-Ausgang NOT-HALT<br />
Querschluss zwischen den Kontakten<br />
unterschiedlicher Ausgänge<br />
Querschluss eines ESC-Ausgangs<br />
mit einem ESC-Eingang<br />
• ESC-Ausgang Betriebsart<br />
Querschluss zwischen den Kanälen ESC-Eingänge<br />
unterschiedlicher ESC-Eingänge<br />
Querschluss zwischen 2 SafeRDW- SafeRDW-Eingänge<br />
Eingängen<br />
Querschluss eines SafeRDW-Ausgangs<br />
auf einen SafeRDW-Eingang<br />
SafeRDW-Ausgänge, SafeRDW-<br />
Eingänge<br />
Funktionsprüfung<br />
Vor der Inbetriebnahme und Wiederinbetriebnahme sind folgende Prüfungen<br />
durchzuführen:<br />
Prüfung allgemein:<br />
Sicherzustellen ist:<br />
• Der Industrieroboter ist gemäß den Angaben in der Dokumentation korrekt<br />
aufgestellt und befestigt.<br />
• Es sind keine Fremdkörper oder defekte, lockere oder lose Teile am Industrieroboter.<br />
• Alle erforderlichen Schutzeinrichtungen sind korrekt installiert und funktionsfähig.<br />
• Die Anschlusswerte des Industrieroboters stimmen mit der örtlichen Netzspannung<br />
und Netzform überein.<br />
• Der Schutzleiter und die Potentialausgleichs-Leitung sind au<strong>sr</strong>eichend<br />
ausgelegt und korrekt angeschlossen.<br />
• Die Verbindungskabel sind korrekt angeschlossen und die Stecker verriegelt.<br />
Prüfung der sicherheitsgerichteten Schaltkreise:<br />
Bei folgenden sicherheitsgerichteten Schaltkreisen muss durch einen Funktionstest<br />
sichergestellt werden, dass sie korrekt arbeiten:<br />
• Lokale NOT-HALT-Einrichtung (= NOT-HALT-Taster am KCP)<br />
• Externe NOT-HALT-Einrichtung (Ein- und Ausgang)<br />
• Zustimmeinrichtung (in den Test-Betriebsarten)<br />
36 / 75 Stand: 06.12.2011 Version: Spez <strong>KR</strong> <strong>C2</strong> <strong>sr</strong> V4 de














