

KR C2 sr - KUKA Robotics
KR C2 sr - KUKA Robotics
KR C2 sr - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
6 Inbetriebnahme und Wiederinbetriebnahme<br />
6 Inbetriebnahme und Wiederinbetriebnahme<br />
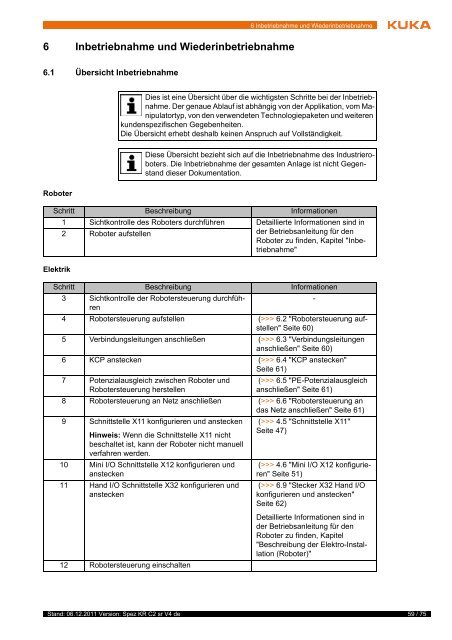
6.1 Übersicht Inbetriebnahme<br />
Dies ist eine Übersicht über die wichtigsten Schritte bei der Inbetriebnahme.<br />
Der genaue Ablauf ist abhängig von der Applikation, vom Manipulatortyp,<br />
von den verwendeten Technologiepaketen und weiteren<br />
kundenspezifischen Gegebenheiten.<br />
Die Übersicht erhebt deshalb keinen Anspruch auf Vollständigkeit.<br />
Roboter<br />
Elektrik<br />
Diese Übersicht bezieht sich auf die Inbetriebnahme des Industrieroboters.<br />
Die Inbetriebnahme der gesamten Anlage ist nicht Gegenstand<br />
dieser Dokumentation.<br />
Schritt Beschreibung Informationen<br />
1 Sichtkontrolle des Roboters durchführen Detaillierte Informationen sind in<br />
2 Roboter aufstellen<br />
der Betriebsanleitung für den<br />
Roboter zu finden, Kapitel "Inbetriebnahme"<br />
Schritt Beschreibung Informationen<br />
3 Sichtkontrolle der Robotersteuerung durchführen<br />
-<br />
4 Robotersteuerung aufstellen (>>> 6.2 "Robotersteuerung aufstellen"<br />
Seite 60)<br />
5 Verbindungsleitungen anschließen (>>> 6.3 "Verbindungsleitungen<br />
anschließen" Seite 60)<br />
6 KCP anstecken (>>> 6.4 "KCP anstecken"<br />
Seite 61)<br />
7 Potenzialausgleich zwischen Roboter und<br />
Robotersteuerung herstellen<br />
(>>> 6.5 "PE-Potenzialausgleich<br />
anschließen" Seite 61)<br />
8 Robotersteuerung an Netz anschließen (>>> 6.6 "Robotersteuerung an<br />
das Netz anschließen" Seite 61)<br />
9 Schnittstelle X11 konfigurieren und anstecken<br />
Hinweis: Wenn die Schnittstelle X11 nicht<br />
beschaltet ist, kann der Roboter nicht manuell<br />
verfahren werden.<br />
10 Mini I/O Schnittstelle X12 konfigurieren und<br />
anstecken<br />
11 Hand I/O Schnittstelle X32 konfigurieren und<br />
anstecken<br />
12 Robotersteuerung einschalten<br />
(>>> 4.5 "Schnittstelle X11"<br />
Seite 47)<br />
(>>> 4.6 "Mini I/O X12 konfigurieren"<br />
Seite 51)<br />
(>>> 6.9 "Stecker X32 Hand I/O<br />
konfigurieren und anstecken"<br />
Seite 62)<br />
Detaillierte Informationen sind in<br />
der Betriebsanleitung für den<br />
Roboter zu finden, Kapitel<br />
"Beschreibung der Elektro-Installation<br />
(Roboter)"<br />
Stand: 06.12.2011 Version: Spez <strong>KR</strong> <strong>C2</strong> <strong>sr</strong> V4 de<br />
59 / 75














