Thema "Navigation und Medizin" - Universität zu Lübeck
Thema "Navigation und Medizin" - Universität zu Lübeck
Thema "Navigation und Medizin" - Universität zu Lübeck

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Verfahren findet vor allem in der Robotik Anwendung,<br />
wenn Rotationen von mehrgliedrigen Roboterarmen <strong>zu</strong><br />
beschreiben sind. Mittels Quaternionen dargestellte Rotationen<br />
finden aufgr<strong>und</strong> ihrer leichten formalen Handhabung<br />
häufig Anwendung in der Softwaretechnik. Ein<br />
Quaternion definiert eine Drehachse <strong>und</strong> den Winkel<br />
der um diese Achse aus<strong>zu</strong>führenden Rotation. In <strong>Navigation</strong>ssystemen<br />
sind alle Arten von Beschreibungen<br />
an<strong>zu</strong>treffen.<br />
Somit ergeben sich insgesamt 6 <strong>zu</strong> bestimmende Freiheitsgrade<br />
<strong>zu</strong>r exakten Lokalisation eines Objektes im<br />
Raum. Um diese 6 variablen Größen bestimmen <strong>zu</strong><br />
können, wird sich in der Praxis verschiedener Verfahren<br />
bedient, die unterschiedliche physikalische Effekte ausnutzen.<br />
Die meisten Verfahren stimmen jedoch in sofern<br />
überein, dass sie alle die Position nur eines Punktes im<br />
Raum bestimmen. Dies reicht allerdings nur aus, um die<br />
Translation <strong>zu</strong> messen, nicht jedoch die Rotation. Dafür<br />
muss das Objekt an mindestens 3 Punkten erfasst<br />
werden. So kann man alle 6 Freiheitsgrade bei starren<br />
Körpern verlässlich errechnen. Vor allem beim Einsatz<br />
in der erweiterten Realität (Augmented Reality) <strong>zu</strong>m<br />
Visualisieren präoperativer Daten ergibt sich jedoch das<br />
Problem, dass der Patient kein starrer Körper ist. Daher<br />
muss gesichert werden, dass die Gültigkeit der präoperativ<br />
akquirierten Daten über Position, Orientierung <strong>und</strong><br />
Form von relevanten Körperregionen nicht verloren<br />
geht. Von der Datenaufnahme bis <strong>zu</strong>m Moment des Eingriffs<br />
dürfen keine Änderungen an der <strong>zu</strong> behandelnden<br />
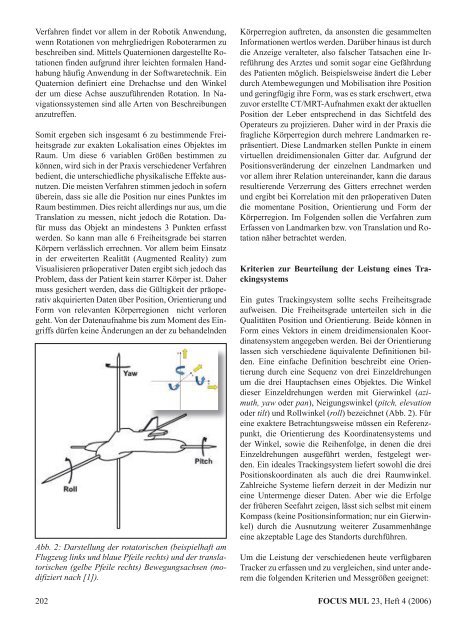
Abb. 2: Darstellung der rotatorischen (beispielhaft am<br />
Flugzeug links <strong>und</strong> blaue Pfeile rechts) <strong>und</strong> der translatorischen<br />
(gelbe Pfeile rechts) Bewegungsachsen (modifiziert<br />
nach [1]).<br />
Körperregion auftreten, da ansonsten die gesammelten<br />
Informationen wertlos werden. Darüber hinaus ist durch<br />
die Anzeige veralteter, also falscher Tatsachen eine Irreführung<br />
des Arztes <strong>und</strong> somit sogar eine Gefährdung<br />
des Patienten möglich. Beispielsweise ändert die Leber<br />
durch Atembewegungen <strong>und</strong> Mobilisation ihre Position<br />
<strong>und</strong> geringfügig ihre Form, was es stark erschwert, etwa<br />
<strong>zu</strong>vor erstellte CT/MRT-Aufnahmen exakt der aktuellen<br />
Position der Leber entsprechend in das Sichtfeld des<br />
Operateurs <strong>zu</strong> projizieren. Daher wird in der Praxis die<br />
fragliche Körperregion durch mehrere Landmarken repräsentiert.<br />
Diese Landmarken stellen Punkte in einem<br />
virtuellen dreidimensionalen Gitter dar. Aufgr<strong>und</strong> der<br />
Positionsveränderung der einzelnen Landmarken <strong>und</strong><br />
vor allem ihrer Relation untereinander, kann die daraus<br />
resultierende Verzerrung des Gitters errechnet werden<br />
<strong>und</strong> ergibt bei Korrelation mit den präoperativen Daten<br />
die momentane Position, Orientierung <strong>und</strong> Form der<br />
Körperregion. Im Folgenden sollen die Verfahren <strong>zu</strong>m<br />
Erfassen von Landmarken bzw. von Translation <strong>und</strong> Rotation<br />
näher betrachtet werden.<br />
Kriterien <strong>zu</strong>r Beurteilung der Leistung eines Trackingsystems<br />
Ein gutes Trackingsystem sollte sechs Freiheitsgrade<br />
aufweisen. Die Freiheitsgrade unterteilen sich in die<br />
Qualitäten Position <strong>und</strong> Orientierung. Beide können in<br />
Form eines Vektors in einem dreidimensionalen Koordinatensystem<br />
angegeben werden. Bei der Orientierung<br />
lassen sich verschiedene äquivalente Definitionen bilden.<br />
Eine einfache Definition beschreibt eine Orientierung<br />
durch eine Sequenz von drei Einzeldrehungen<br />
um die drei Hauptachsen eines Objektes. Die Winkel<br />
dieser Einzeldrehungen werden mit Gierwinkel (azimuth,<br />
yaw oder pan), Neigungswinkel (pitch, elevation<br />
oder tilt) <strong>und</strong> Rollwinkel (roll) bezeichnet (Abb. 2). Für<br />
eine exaktere Betrachtungsweise müssen ein Referenzpunkt,<br />
die Orientierung des Koordinatensystems <strong>und</strong><br />
der Winkel, sowie die Reihenfolge, in denen die drei<br />
Einzeldrehungen ausgeführt werden, festgelegt werden.<br />
Ein ideales Trackingsystem liefert sowohl die drei<br />
Positionskoordinaten als auch die drei Raumwinkel.<br />
Zahlreiche Systeme liefern derzeit in der Medizin nur<br />
eine Untermenge dieser Daten. Aber wie die Erfolge<br />
der früheren Seefahrt zeigen, lässt sich selbst mit einem<br />
Kompass (keine Positionsinformation; nur ein Gierwinkel)<br />
durch die Ausnut<strong>zu</strong>ng weiterer Zusammenhänge<br />
eine akzeptable Lage des Standorts durchführen.<br />
Um die Leistung der verschiedenen heute verfügbaren<br />
Tracker <strong>zu</strong> erfassen <strong>und</strong> <strong>zu</strong> vergleichen, sind unter anderem<br />
die folgenden Kriterien <strong>und</strong> Messgrößen geeignet:<br />
202 FOCUS MUL 23, Heft 4 (2006)