Thema "Navigation und Medizin" - Universität zu Lübeck
Thema "Navigation und Medizin" - Universität zu Lübeck
Thema "Navigation und Medizin" - Universität zu Lübeck

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
tionen <strong>und</strong> Rotationen des Patienten simuliert werden.<br />
Es wird jeweils eine digital rekonstruierte Röntgenaufnahme<br />
(DRR) für die beiden Kameraeinstellungen berechnet<br />
<strong>und</strong> für jedes DRR-Paar werden Translation <strong>und</strong><br />
Rotation des CT gespeichert. Intra-operativ können die<br />
von den Röntgenkameras aufgenommenen Bilder sehr<br />
schnell mit den gespeicherten DRR verglichen werden,<br />
um so Lageveränderungen der Knochenstrukturen – <strong>und</strong><br />
damit des Tumors – <strong>zu</strong> erkennen.<br />
Eine genaue <strong>Navigation</strong> ist aber auch möglich, wenn ein<br />
Tumor vor allem von Weichgewebe umgeben ist <strong>und</strong><br />
seine Lage ständig ändert. Da<strong>zu</strong> werden prä-operativ<br />
kleine Goldmarker in der Nähe des Tumors implantiert.<br />
Aus dem Planungs-CT lässt sich die Lage des Tumors<br />
relativ <strong>zu</strong> den Goldmarkern bestimmen. Auf den während<br />
der Behandlung erfassten Röntgenaufnahmen sind<br />
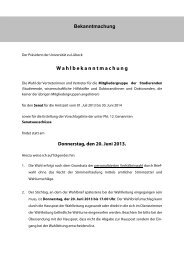
die Goldmarker ebenfalls gut <strong>zu</strong> erkennen (Abb. 3) <strong>und</strong><br />
ihre Position kann <strong>zu</strong>verlässig <strong>und</strong> automatisch berechnet<br />
werden. Daraus folgt wieder die Lage des Tumors.<br />
Aufgr<strong>und</strong> der für die Bildverarbeitung <strong>und</strong> die Roboteransteuerung<br />
benötigten Zeit ist diese Methode <strong>zu</strong>r<br />
<strong>Navigation</strong> bei relativ schnellen Tumorbewegungen,<br />
Abb. 3: CT-Schicht mit einem Goldmarker in der Nähe<br />
eines Lungentumors (links); räumliche Darstellung<br />
mehrerer Goldmarker (rechts).<br />
wie sie <strong>zu</strong>m Beispiel durch die Atmung hervorgerufen<br />
werden, noch nicht ausreichend. Um eine Echtzeit-<strong>Navigation</strong><br />
<strong>zu</strong> erreichen, wird mit einem Infrarot-Trackingsystem<br />
die Bewegung des Brustkorbes gemessen. Am<br />
Anfang einer Behandlung wird eine Reihe von Röntgenbildern<br />
aufgenommen <strong>und</strong> <strong>zu</strong> jedem Bild wird die Position<br />
der Infrarot-Marker auf dem Brustkorb gespeichert.<br />
Aus diesen Daten wird ein Modell berechnet, das die<br />
extern gemessene Brustkorbbewegung mit der aus den<br />
Röntgenbildern ermittelten Tumorbewegung korreliert.<br />
Intra-operativ wird dieses Korrelationsmodell ständig<br />
aktualisiert <strong>und</strong> dient <strong>zu</strong>r Bestimmung der Tumorposition<br />
während Röntgenbilder erfasst <strong>und</strong> ausgewertet werden.<br />
Zusätzlich wird ein Prädiktionsmodell erstellt, um<br />
die Latenzzeiten bei der Roboteransteuerung <strong>zu</strong> überbrücken.<br />
Dadurch ist eine millimetergenaue Positionierung<br />
der Behandlungsstrahlen auch bei atembewegten<br />
Abb. 4: Schematische Darstellung der <strong>Navigation</strong> <strong>zu</strong>m<br />
Ausgleich von Atembewegungen. Die Bewegungen der<br />
externen Marker <strong>und</strong> des Tumors fließen in ein Korrelationsmodell<br />
ein, mittels eines Prädiktionsmodells wird<br />
der Behandlungsstrahl synchron <strong>zu</strong>m Tumor bewegt.<br />
Tumoren möglich. Der Ablauf der bewegungskompensierenden<br />
<strong>Navigation</strong> ist in Abbildung 4 schematisch<br />
dargestellt.<br />
Derzeit wird in einem Forschungsprojekt daran gearbeitet,<br />
auch die extra-kraniale Strahlenchirurgie ohne<br />
künstliche Marker vollständig anhand von Bilddaten<br />
durch<strong>zu</strong>führen.<br />
Literatur<br />
1. L. Leksell. Stereotactic radiosurgery. J Neurol Neurosurg Psychiatry.,<br />
46(9):797–803, 1983.<br />
2. A. Schweikard, M. Bodduluri, and J. R. Adler. Planning for cameraguided<br />
robotic radiosurgery. IEEE transactions on robotics and<br />
automation, 14(6):951–962, 1998.<br />
3. J. R. Adler, M. J. Murphy, S. D. Chang, and S. L. Hancock. Imageguided<br />
robotic radiosurgery. Neurosurgery, 44(6):1299–1306,<br />
1999.<br />
4. A. Schweikard, A. Schlaefer, and J. R. Adler. Resampling: An optimization<br />
method for inverse planning in robotic radiosurgery. Med.<br />
Phys., 33(11):4005–4011, 2006.<br />
5. A. Schlaefer, J. Fisseler, S. Dieterich, H. Shiomi, K. Cleary, and A.<br />
Schweikard. Feasibility of four-dimensional conformal planning for<br />
robotic radiosurgery. Med. Phys., 32(12), 2005.<br />
6. A. Schweikard, G. Glosser, M. Bodduluri, M. J. Murphy, and J. R.<br />
Adler. Robotic motion compensation for respiratory movement during<br />
radiosurgery. Computer Aided Surgery, 5(4):263–277, 2000.<br />
7. A. Schweikard, H. Shiomi, and J. Adler. Respiration tracking in<br />
radiosurgery. Med. Phys., 31(8):2738-2741, 2004.<br />
FOCUS MUL 23, Heft 4 (2006) 207