

Mathematische Grundlagen zur 3D Berechnung - Mensch und ...
Mathematische Grundlagen zur 3D Berechnung - Mensch und ...
Mathematische Grundlagen zur 3D Berechnung - Mensch und ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
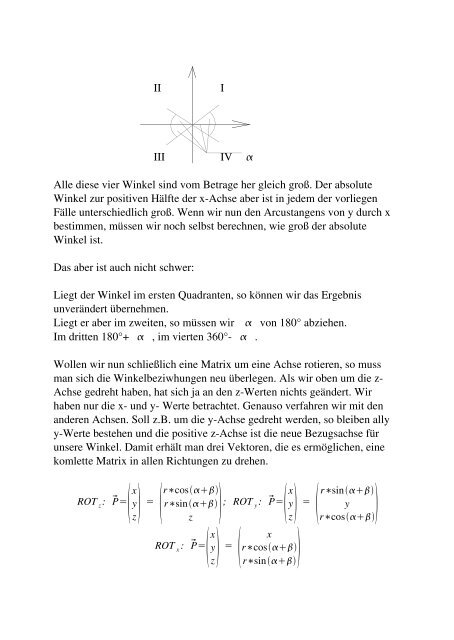
IIIIII IV Alle diese vier Winkel sind vom Betrage her gleich groß. Der absoluteWinkel <strong>zur</strong> positiven Hälfte der xAchse aber ist in jedem der vorliegenFälle unterschiedlich groß. Wenn wir nun den Arcustangens von y durch xbestimmen, müssen wir noch selbst berechnen, wie groß der absoluteWinkel ist.Das aber ist auch nicht schwer:Liegt der Winkel im ersten Quadranten, so können wir das Ergebnisunverändert übernehmen.Liegt er aber im zweiten, so müssen wir von 180° abziehen.Im dritten 180°+ , im vierten 360° .Wollen wir nun schließlich eine Matrix um eine Achse rotieren, so mussman sich die Winkelbeziwhungen neu überlegen. Als wir oben um die zAchse gedreht haben, hat sich ja an den zWerten nichts geändert. Wirhaben nur die x <strong>und</strong> y Werte betrachtet. Genauso verfahren wir mit denanderen Achsen. Soll z.B. um die yAchse gedreht werden, so bleiben allyyWerte bestehen <strong>und</strong> die positive zAchse ist die neue Bezugsachse fürunsere Winkel. Damit erhält man drei Vektoren, die es ermöglichen, einekomlette Matrix in allen Richtungen zu drehen.ROT z: P=xzy =r∗cosP=xr∗sin ; ROT : y y =zzROT x: P=x xy = r∗cosz r∗sinr∗sinyr∗cos