

SCHRIFTENREIHE SCHIFFBAU Hydrostatik von Schiffen
SCHRIFTENREIHE SCHIFFBAU Hydrostatik von Schiffen
SCHRIFTENREIHE SCHIFFBAU Hydrostatik von Schiffen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kleine Änderungen der Schwimmlage 10. Juni 2008<br />
Änderung der Schwerpunktskoordinaten :<br />
ζ<br />
.<br />
δϕ<br />
G<br />
δηG<br />
r δϕ<br />
rsinϕ<br />
=<br />
ϕ<br />
ξ η rcosϕ G= δηG<br />
r<br />
r<br />
.<br />
ζ G<br />
ϕ<br />
.G’<br />
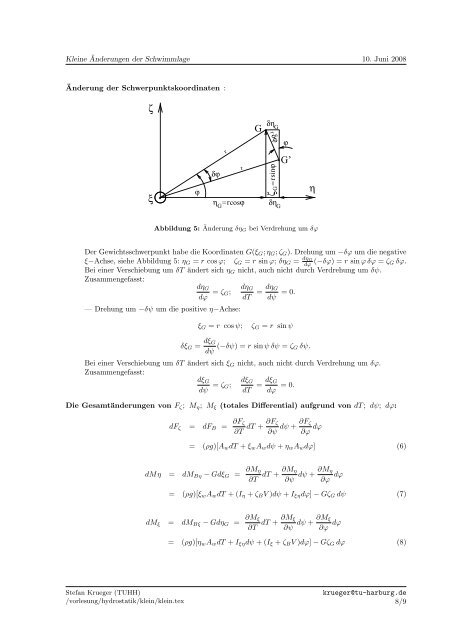
Abbildung 5: Änderung δηG bei Verdrehung um δϕ<br />
Der Gewichtsschwerpunkt habe die Koordinaten G(ξG; ηG; ζG). Drehung um −δϕ um die negative<br />
ξ−Achse, siehe Abbildung 5: ηG = r cos ϕ; ζG = r sin ϕ; δηG = dηG<br />
dϕ (−δϕ) = r sin ϕ δϕ = ζG δϕ.<br />
Bei einer Verschiebung um δT ändert sich ηG nicht, auch nicht durch Verdrehung um δψ.<br />
Zusammengefasst:<br />
dηG<br />
dϕ<br />
= ζG;<br />
— Drehung um −δψ um die positive η−Achse:<br />
dηG<br />
dT<br />
= dηG<br />
dψ<br />
= 0.<br />
ξG = r cos ψ; ζG = r sin ψ<br />
δξG = dξG<br />
dψ (−δψ) = r sin ψ δψ = ζG δψ.<br />
Bei einer Verschiebung um δT ändert sich ξG nicht, auch nicht durch Verdrehung um δϕ.<br />
Zusammengefasst:<br />
dξG dξG dξG<br />
= ζG; = = 0.<br />
dψ dT dϕ<br />
Die Gesamtänderungen <strong>von</strong> Fζ; Mη; Mξ (totales Differential) aufgrund <strong>von</strong> dT ; dψ; dϕ:<br />
Stefan Krueger (TUHH)<br />
/vorlesung/hydrostatik/klein/klein.tex<br />
dFζ = dFB = ∂Fζ<br />
∂T<br />
η<br />
∂Fζ ∂Fζ<br />
dT + dψ +<br />
∂ψ ∂ϕ dϕ<br />
= (ρg)[AwdT + ξwAwdψ + ηwAwdϕ] (6)<br />
dMη = dMBη − GdξG = ∂Mη<br />
∂T<br />
∂Mη ∂Mη<br />
dT + dψ +<br />
∂ψ ∂ϕ dϕ<br />
= (ρg)[ξwAwdT + (Iη + ζBV )dψ + Iξηdϕ] − GζG dψ (7)<br />
dMξ = dMBξ − GdηG = ∂Mξ<br />
∂T<br />
∂Mξ ∂Mξ<br />
dT + dψ +<br />
∂ψ ∂ϕ dϕ<br />
= (ρg)[ηwAwdT + Iξηdψ + (Iξ + ζBV )dϕ] − GζG dϕ (8)<br />
krueger@tu-harburg.de<br />
8/9














