Hi-Res PDF - CRCnetBASE
Hi-Res PDF - CRCnetBASE
Hi-Res PDF - CRCnetBASE

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
258<br />
Braking Force, kN<br />
250<br />
200<br />
150<br />
100<br />
50<br />
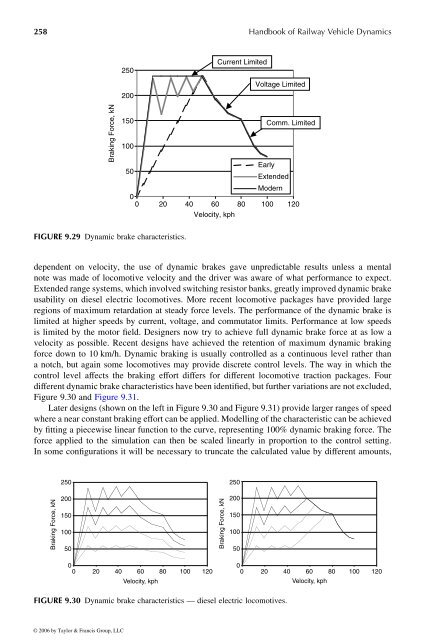
FIGURE 9.29 Dynamic brake characteristics.<br />
0<br />
Current Limited<br />
Voltage Limited<br />
0 20 40 60 80 100 120<br />
Velocity, kph<br />
dependent on velocity, the use of dynamic brakes gave unpredictable results unless amental<br />
note was made of locomotive velocity and the driver was aware of what performance to expect.<br />
Extended range systems, which involved switching resistor banks, greatly improved dynamic brake<br />
usability ondiesel electric locomotives. More recent locomotive packages have provided large<br />
regions of maximum retardation at steady force levels. The performance ofthe dynamic brake is<br />
limited at higher speeds by current, voltage, and commutator limits. Performance at low speeds<br />
is limited by the motor field. Designers now try to achieve full dynamic brake force at as low a<br />
velocity as possible. Recent designs have achieved the retention of maximum dynamic braking<br />
force down to 10 km/h. Dynamic braking is usually controlled as acontinuous level rather than<br />
anotch, but again some locomotives may provide discrete control levels. The way in which the<br />
control level affects the braking effort differs for different locomotive traction packages. Four<br />
different dynamic brake characteristics have been identified, but further variations are not excluded,<br />
Figure 9.30 and Figure 9.31.<br />
Laterdesigns (shown on the left in Figure9.30 and Figure9.31)provide larger rangesofspeed<br />
where anear constant braking effort can be applied.Modelling of the characteristic can be achieved<br />
by fitting apiecewise linear function to the curve, representing 100% dynamic braking force. The<br />
force applied to the simulation can then be scaled linearly in proportion to the control setting.<br />
In some configurations it will be necessary to truncate the calculated value bydifferent amounts,<br />
Braking Force, kN<br />
250<br />
200<br />
150<br />
100<br />
50<br />
0<br />
0 20 40 60 80 100 120<br />
Velocity, kph<br />
250<br />
200<br />
150<br />
100<br />
50<br />
Early<br />
Comm. Limited<br />
Extended<br />
Modern<br />
FIGURE 9.30 Dynamic brake characteristics —diesel electric locomotives.<br />
© 2006 by Taylor & Francis Group, LLC<br />
Braking Force, kN<br />
Handbook of Railway Vehicle Dynamics<br />
0<br />
0 20 40 60 80 100 120<br />
Velocity, kph