Hi-Res PDF - CRCnetBASE
Hi-Res PDF - CRCnetBASE
Hi-Res PDF - CRCnetBASE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Longitudinal Train Dynamics 273<br />
<strong>Res</strong>istance, N/tonne<br />
individual vehicle mass i ,kg; m t is the total train mass, kg; F crj is the curving resistance for curve j<br />
in Newtons; F pri is the propulsion resistance for vehicle i in Newtons; q is the number of vehicles;<br />
and r is the number of curves.<br />
Unless the track is extremely flat and signalling conditions particularly favourable, the energy<br />
used will be much larger than given bythe above equation. However, it is auseful equation in<br />
determining how much scope exists for improved system design and practice. It is illustrative to<br />
consider asimple example of a2000tonne freight train with arunning speed of 80 km/h. The work<br />
carried out to bring the train to speed, represented in Equation 9.25, by the kinetic energy term, is<br />
lost every time the train must be stopped and partly lost by any brake application. The energy loss<br />
per train stop in terms of other parameters in the equation are given inTable 9.3.<br />
What can be seen at aglance from Table 9.3 is the very high cost of stop starts compared to<br />
other parameters. Air resistance becomes more significant for higherrunning speeds. <strong>Hi</strong>gh densities<br />
of tight curves can also add considerablecosts. It shouldbenoted that this analysisdoes not include<br />
the additional costs in rail wear or speed restriction also added by curves.<br />
5. Distributed Power Configurations<br />
40<br />
30<br />
20<br />
10<br />
0<br />
0 20 40 60 80 100 120 140<br />
Velocity, kph<br />
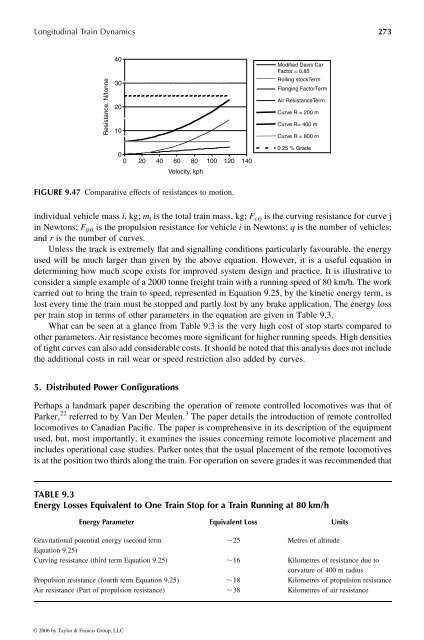
FIGURE 9.47 Comparative effects of resistances to motion.<br />
Modified Davis Car<br />
Factor =0.85<br />
Rolling stockTerm<br />
Flanging FactorTerm<br />
Air <strong>Res</strong>istanceTerm<br />
Curve R=200 m<br />
Curve R= 400 m<br />
Curve R=800 m<br />
0.25 %Grade<br />
Perhaps alandmark paper describing the operation of remote controlled locomotives was that of<br />
Parker, 22 referred to by Van Der Meulen. 3 The paper details the introduction of remote controlled<br />
locomotives to Canadian Pacific. The paper is comprehensive in its description of the equipment<br />
used, but, most importantly, it examines the issues concerning remote locomotive placement and<br />
includes operational case studies. Parker notes that the usual placement of the remote locomotives<br />
is at the position two thirds alongthe train. For operation on severe grades it was recommended that<br />
TABLE 9.3<br />
Energy Losses Equivalent to One Train Stop for aTrain Running at 80 km/h<br />
Energy Parameter Equivalent Loss Units<br />
Gravitational potential energy (second term<br />
Equation 9.25)<br />
, 25 Metres of altitude<br />
Curving resistance (third term Equation 9.25) , 16 Kilometres ofresistance due to<br />
curvature of400 mradius<br />
Propulsion resistance (fourth term Equation 9.25) , 18 Kilometres ofpropulsion resistance<br />
Air resistance (Part of propulsion resistance) , 38 Kilometres ofair resistance<br />
© 2006 by Taylor & Francis Group, LLC