Guidelines for the use of GNSS in surveying and mapping
Guidelines for the use of GNSS in surveying and mapping
Guidelines for the use of GNSS in surveying and mapping

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
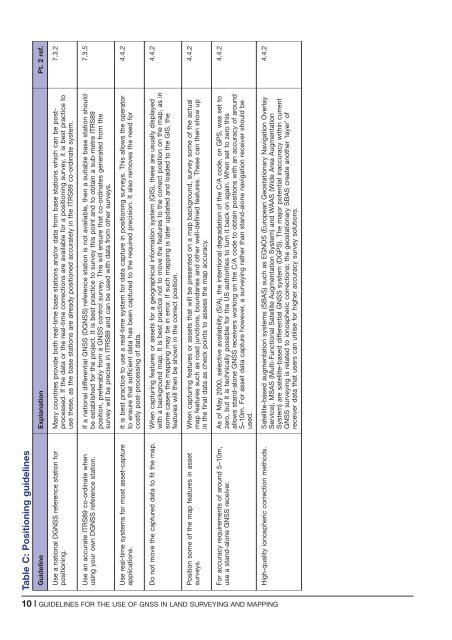
Table C: Position<strong>in</strong>g guidel<strong>in</strong>es<br />
Guidel<strong>in</strong>e Explanation Pt. 2 ref.<br />
Use a national D<strong>GNSS</strong> reference station <strong>for</strong><br />
position<strong>in</strong>g.<br />
Many countries provide both real-time base stations <strong>and</strong>/or data from base stations which can be postprocessed.<br />
If <strong>the</strong> data or <strong>the</strong> real-time corrections are available <strong>for</strong> a position<strong>in</strong>g survey, it is best practice to<br />
<strong>use</strong> <strong>the</strong>se, as <strong>the</strong> base stations are already positioned accurately <strong>in</strong> <strong>the</strong> ITRS89 co-ord<strong>in</strong>ate system.<br />
7.3.2<br />
Use an accurate ITRS89 co-ord<strong>in</strong>ate when<br />
us<strong>in</strong>g your own D<strong>GNSS</strong> reference station.<br />
If a national differential <strong>GNSS</strong> (D<strong>GNSS</strong>) reference station is not available, <strong>the</strong>n a suitable base station should<br />
be established <strong>for</strong> <strong>the</strong> project. It is best practice to survey this po<strong>in</strong>t <strong>and</strong> to obta<strong>in</strong> a sub-metre ITRS89<br />
position, preferably from a <strong>GNSS</strong> control survey. This will ensure that co-ord<strong>in</strong>ates generated from <strong>the</strong><br />
survey will be precise <strong>in</strong> ITRS89 <strong>and</strong> can be <strong>use</strong>d with data from o<strong>the</strong>r surveys.<br />
7.3.5<br />
Use real-time systems <strong>for</strong> most asset-capture<br />
applications.<br />
It is best practice to <strong>use</strong> a real-time system <strong>for</strong> data capture <strong>in</strong> position<strong>in</strong>g surveys. This allows <strong>the</strong> operator<br />
to ensure that sufficient data has been captured to <strong>the</strong> required precision. It also removes <strong>the</strong> need <strong>for</strong><br />
costly post-process<strong>in</strong>g <strong>of</strong> data.<br />
4.4.2<br />
Do not move <strong>the</strong> captured data to fit <strong>the</strong> map. When captur<strong>in</strong>g features or assets <strong>for</strong> a geographical <strong>in</strong><strong>for</strong>mation system (GIS), <strong>the</strong>se are usually displayed<br />
with a background map. It is best practice not to move <strong>the</strong> features to <strong>the</strong> correct position on <strong>the</strong> map, as <strong>in</strong><br />
some cases <strong>the</strong> mapp<strong>in</strong>g may be <strong>in</strong> error. If such mapp<strong>in</strong>g is later updated <strong>and</strong> loaded to <strong>the</strong> GIS, <strong>the</strong><br />
features will <strong>the</strong>n be shown <strong>in</strong> <strong>the</strong> correct position.<br />
4.4.2<br />
Position some <strong>of</strong> <strong>the</strong> map features <strong>in</strong> asset<br />
surveys.<br />
When captur<strong>in</strong>g features or assets that will be presented on a map background, survey some <strong>of</strong> <strong>the</strong> actual<br />
map features such as road junctions, boundaries <strong>and</strong> o<strong>the</strong>r well-def<strong>in</strong>ed features. These can <strong>the</strong>n show up<br />
<strong>in</strong> <strong>the</strong> f<strong>in</strong>al data as check po<strong>in</strong>ts to assess <strong>the</strong> map accuracy.<br />
4.4.2<br />
For accuracy requirements <strong>of</strong> around 5–10m,<br />
<strong>use</strong> a st<strong>and</strong>-alone <strong>GNSS</strong> receiver.<br />
As <strong>of</strong> May 2000, selective availability (S/A), <strong>the</strong> <strong>in</strong>tentional degradation <strong>of</strong> <strong>the</strong> C/A code, on GPS, was set to<br />
zero, but it is technically possible <strong>for</strong> <strong>the</strong> US authorities to turn it back on aga<strong>in</strong>. When set to zero this<br />
allows st<strong>and</strong>-alone <strong>GNSS</strong> receivers work<strong>in</strong>g on <strong>the</strong> C/A code to obta<strong>in</strong> positions with an accuracy <strong>of</strong> around<br />
5–10m. For asset data capture however, a survey<strong>in</strong>g ra<strong>the</strong>r than st<strong>and</strong>-alone navigation receiver should be<br />
<strong>use</strong>d.<br />
4.4.2<br />
High-quality ionospheric correction methods. Satellite-based augmentation systems (SBAS) such as EGNOS (European Geostationary Navigation Overlay<br />
Service), MSAS (Multi-Functional Satellite Augmentation System) <strong>and</strong> WAAS (Wide Area Augmentation<br />
System) are satellite-based differential <strong>GNSS</strong> system (DGPS). The major potential <strong>in</strong>accuracy with<strong>in</strong> current<br />
<strong>GNSS</strong> survey<strong>in</strong>g is related to ionospheric corrections; <strong>the</strong> geostationary SBAS create ano<strong>the</strong>r ‘layer’ <strong>of</strong><br />
receiver data that <strong>use</strong>rs can utilise <strong>for</strong> higher accuracy survey solutions.<br />
4.4.2<br />
10 | GUIDELINES FOR THE USE OF <strong>GNSS</strong> IN LAND SURVEYING AND MAPPING