Th`ese Marouan BOUALI - Sites personnels de TELECOM ParisTech
Th`ese Marouan BOUALI - Sites personnels de TELECOM ParisTech
Th`ese Marouan BOUALI - Sites personnels de TELECOM ParisTech

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
101<br />
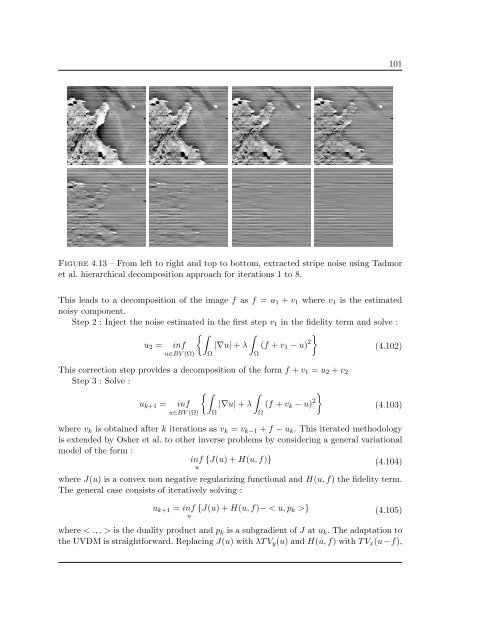
Figure 4.13 – From left to right and top to bottom, extracted stripe noise using Tadmor<br />
et al. hierarchical <strong>de</strong>composition approach for iterations 1 to 8.<br />
This leads to a <strong>de</strong>composition of the image f as f = u 1 + v 1 where v 1 is the estimated<br />
noisy component.<br />
Step 2 : Inject the noise estimated in the first step v 1 in the fi<strong>de</strong>lity term and solve :<br />
{∫ ∫<br />
u 2 =<br />
inf<br />
u∈BV (Ω)<br />
|∇u| + λ<br />
Ω<br />
Ω<br />
(f + v 1 − u) 2 }<br />
(4.102)<br />
This correction step provi<strong>de</strong>s a <strong>de</strong>composition of the form f + v 1 = u 2 + v 2<br />
Step 3 : Solve :<br />
{∫ ∫<br />
}<br />
u k+1 = inf |∇u| + λ (f + v k − u) 2<br />
u∈BV (Ω) Ω<br />
Ω<br />
(4.103)<br />
where v k is obtained after k iterations as v k = v k−1 + f − u k . This iterated methodology<br />
is exten<strong>de</strong>d by Osher et al. to other inverse problems by consi<strong>de</strong>ring a general variational<br />
mo<strong>de</strong>l of the form :<br />
inf {J(u)+H(u, f)} (4.104)<br />
u<br />
where J(u) is a convex non negative regularizing functional and H(u, f) the fi<strong>de</strong>lity term.<br />
The general case consists of iteratively solving :<br />
u k+1 = inf<br />
u<br />
{J(u)+H(u, f)− < u, p k >} (4.105)<br />
where < ., . > is the duality product and p k is a subgradient of J at u k . The adaptation to<br />
the UVDM is straightforward. Replacing J(u) with λT V y (u) and H(u, f) with TV x (u−f),