Th`ese Marouan BOUALI - Sites personnels de TELECOM ParisTech
Th`ese Marouan BOUALI - Sites personnels de TELECOM ParisTech
Th`ese Marouan BOUALI - Sites personnels de TELECOM ParisTech

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
75<br />
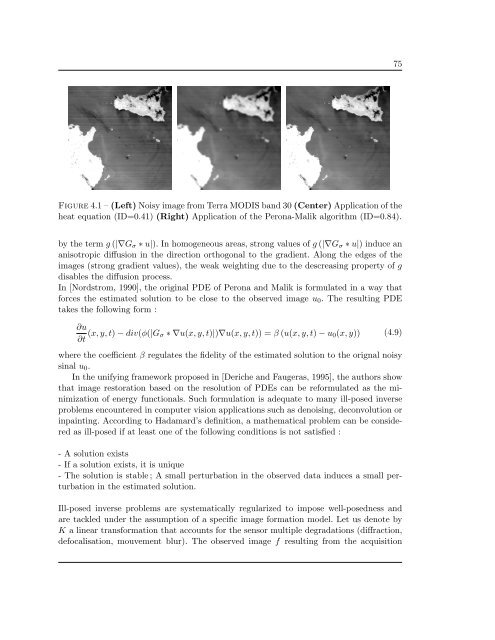
Figure 4.1 – (Left) Noisy image from Terra MODIS band 30 (Center) Application of the<br />
heat equation (ID=0.41) (Right) Application of the Perona-Malik algorithm (ID=0.84).<br />
by the term g (|∇G σ ∗ u|). In homogeneous areas, strong values of g (|∇G σ ∗ u|) induce an<br />
anisotropic diffusion in the direction orthogonal to the gradient. Along the edges of the<br />
images (strong gradient values), the weak weighting due to the <strong>de</strong>screasing property of g<br />
disables the diffusion process.<br />
In [Nordstrom, 1990], the original PDE of Perona and Malik is formulated in a way that<br />
forces the estimated solution to be close to the observed image u 0 . The resulting PDE<br />
takes the following form :<br />
∂u<br />
∂t (x, y, t) − div(φ(|G σ ∗∇u(x, y, t)|)∇u(x, y, t)) = β (u(x, y, t) − u 0 (x, y)) (4.9)<br />
where the coefficient β regulates the fi<strong>de</strong>lity of the estimated solution to the orignal noisy<br />
sinal u 0 .<br />
In the unifying framework proposed in [Deriche and Faugeras, 1995], the authors show<br />
that image restoration based on the resolution of PDEs can be reformulated as the minimization<br />
of energy functionals. Such formulation is a<strong>de</strong>quate to many ill-posed inverse<br />
problems encountered in computer vision applications such as <strong>de</strong>noising, <strong>de</strong>convolution or<br />
inpainting. According to Hadamard’s <strong>de</strong>finition, a mathematical problem can be consi<strong>de</strong>red<br />
as ill-posed if at least one of the following conditions is not satisfied :<br />
- A solution exists<br />
- If a solution exists, it is unique<br />
- The solution is stable ; A small perturbation in the observed data induces a small perturbation<br />
in the estimated solution.<br />
Ill-posed inverse problems are systematically regularized to impose well-posedness and<br />
are tackled un<strong>de</strong>r the assumption of a specific image formation mo<strong>de</strong>l. Let us <strong>de</strong>note by<br />
K a linear transformation that accounts for the sensor multiple <strong>de</strong>gradations (diffraction,<br />
<strong>de</strong>focalisation, mouvement blur). The observed image f resulting from the acquisition