- Page 1 and 2:
V1.0Programming ManualElektor Proto
- Page 3 and 4:
Communications Protocol ...........
- Page 5 and 6:
Blok schematic:Bart Huyskens Manual
- Page 7 and 8:
Different modules on PCB levelBart
- Page 9 and 10:
AVR add-on board• The AVR board h
- Page 11 and 12:
Servo moduleSCL-SDAHeadSCL-SDAUS di
- Page 13 and 14:
List of all the connectors on the m
- Page 15 and 16:
J26J27J28J29 +-J30J31J33J34J35GND12
- Page 17 and 18:
char I2C_RECEIVE_BYTE(char Last);vo
- Page 19 and 20:
How to set up Flowcode 4 (PIC) for
- Page 21 and 22:
How to set up Flowcode 4 (AVR) for
- Page 23 and 24:
How to set op AVRSTUDIO - WINAVR /
- Page 25 and 26:
Click on the gear-logo “Edit curr
- Page 27 and 28: Make sure that your fuses tab scree
- Page 29 and 30: How to set up MPLAB - HITECH C Lite
- Page 31 and 32: We choose not to add any file to th
- Page 33 and 34: •Copy paste the “PIC_PROTON_LIB
- Page 35 and 36: Bart Huyskens Manual Elektor Proton
- Page 37 and 38: }{PORTD = 0x0F;__delay_ms(200);PORT
- Page 39 and 40: PIC16F887Demoprogram Flowcode PIC V
- Page 41 and 42: These are 2 normally open push butt
- Page 43 and 44: • After the readbyte instruction
- Page 45 and 46: READ DATA FROM THE SLAVEFor example
- Page 47 and 48: void main(){// init AD & Option reg
- Page 49 and 50: Experience: We use this LCD in I2C
- Page 51 and 52: Commands to write in the command re
- Page 53 and 54: Custom char generatorCustom charact
- Page 55 and 56: The servo motors in the head and th
- Page 57 and 58: This robot can be equipped with up
- Page 59 and 60: Although the signal for the positio
- Page 61 and 62: The head with ldr’s, RGB-led’s
- Page 63 and 64: Head I2C Slave address = 0x10Index
- Page 65 and 66: Proton robot developer’s notes:Th
- Page 67 and 68: When a ranging command in cm is giv
- Page 69 and 70: address of a sonar currently at 0xE
- Page 71 and 72: The MD25 motor driver moduleThis pr
- Page 73 and 74: Proton robot developer’s notes:Th
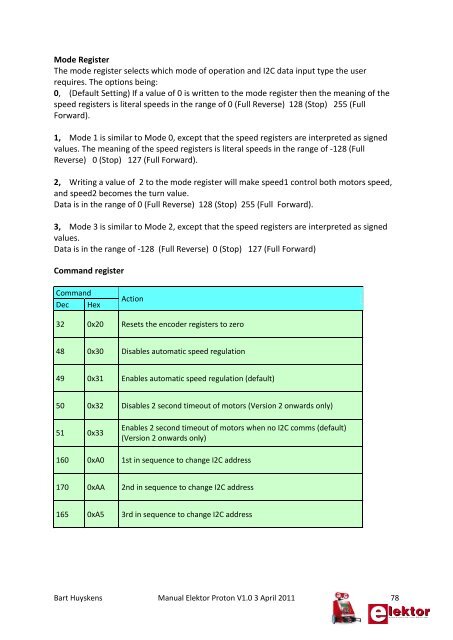
- Page 75 and 76: The MD25 has 17 registers numbered
- Page 77: ultimate speed, the MD25 has a regi
- Page 81 and 82: The line sensor module with 3 IR li
- Page 83 and 84: Photo of the 3 line follow sensorsT
- Page 85 and 86: Analogue to digital conversion expl
- Page 87 and 88: }}Proton robot developer’s notes:
- Page 89 and 90: RS232 communication explainedRS-232
- Page 91 and 92: Proton robot developer’s notes:Th
- Page 93 and 94: • Supportso MMC, SDC, SDHC card f
- Page 95 and 96: Communications ProtocolDescriptionT
- Page 97 and 98: Prompt CharacterSetting name: PThis
- Page 99 and 100: BoostSetting name: BSets the defaul
- Page 101 and 102: Input/Output Interface SettingsInpu
- Page 103 and 104: SettingsDescriptionNon-volatile set
- Page 105 and 106: Play NextDescriptionThis plays the
- Page 107 and 108: StopDescriptionStops playback.Forma
- Page 109 and 110: Playback StatusDescriptionThis show
- Page 111 and 112: Play ToneDescriptionThis command pl
- Page 113 and 114: Reset AudioDescriptionResets the au
- Page 115 and 116: Loop CountDescriptionGets or sets t
- Page 117 and 118: 1 1 0001 1 +1.5 dB2 2 0010 2 +3 dB3
- Page 119 and 120: This command will copy data from an
- Page 121 and 122: CloseDescriptionCloses an open file
- Page 123 and 124: Parameters• path is the absolute
- Page 125 and 126: InfoDescriptionGives the file posit
- Page 127 and 128: Card InfoDescriptionGets card speci
- Page 129 and 130:
List DirectoryDescriptionThe List D
- Page 131 and 132:
L /PICTURES/*.JPG«sp»----A 2008/0
- Page 133 and 134:
RenameDescriptionRenames/moves a fi
- Page 135 and 136:
O 1 R /LOGS/JANUARY/JAN03.LOGOpen a
- Page 137 and 138:
DescriptionYou can read up to 512 b
- Page 139 and 140:
Read LineDescriptionThe Read Line c
- Page 141 and 142:
WriteDescriptionYou can write up to
- Page 143 and 144:
E /LOG.TXTO 1 RW /LOG.TXTS E0I 10/0
- Page 145 and 146:
Table of SettingsCommunication Sett
- Page 147 and 148:
Input/Output Interface SettingsSett
- Page 149 and 150:
Proton main program for PIC in C:/*
- Page 151 and 152:
void UART_STRING_RECEIVE(char *rece
- Page 153 and 154:
}SSPBUF=Data;//Send bytewhile((PIR1
- Page 155 and 156:
}}// Writes an integer value to the
- Page 157 and 158:
s++;}}//bit STRING_IN( const char *
- Page 159 and 160:
eturn;}}}}}/***********************
- Page 161 and 162:
Proton main program for AVR in C:/*
- Page 163 and 164:
char STR_PREFIX( const char *p, con
- Page 165 and 166:
}TWCR = (1
- Page 167 and 168:
LCD_WRITE_STRING(String);alsoLCD_WR
- Page 169 and 170:
n--;}}//bit char_in( char c, const
- Page 171 and 172:
}} else {_delay_us( 100 );t++;if( t
- Page 173 and 174:
Cheat sheet C - for Hitech C compil
- Page 175:
Version changes summary09/04/2011 v