

Final report for WP4.3: Enhancement of design methods ... - Upwind
Final report for WP4.3: Enhancement of design methods ... - Upwind
Final report for WP4.3: Enhancement of design methods ... - Upwind

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
UPWIND WP4: Offshore Support Structures and Foundations<br />
unrestrained motion (surge) [m]<br />
0.05<br />
0.04<br />
0.03<br />
0.02<br />
0.01<br />
0<br />
-0.01<br />
-0.02<br />
Monochromatic wave (T=5 s; H=1 m)<br />
-0.03<br />
0 5 10 15<br />
Time [s]<br />
unrestrained motion (surge) [m]<br />
0.06<br />
0.04<br />
0.02<br />
0<br />
-0.02<br />
-0.04<br />
-0.06<br />
Monochromatic wave (T=7 s; H=2 m)<br />
-0.08<br />
0 5 10 15 20 25<br />
Time [s]<br />
113<br />
unrestrained motion (surge) [m]<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
-0.2<br />
-0.4<br />
-0.6<br />
Monochromatic wave (T=9 s; H=4 m)<br />
-0.8<br />
0 5 10 15<br />
Time [s]<br />
20 25 30<br />
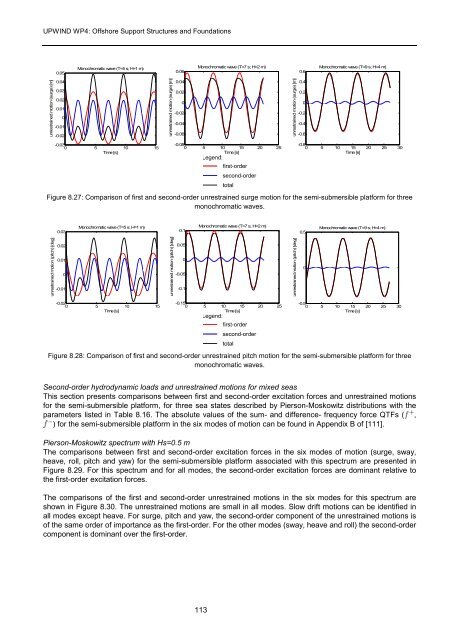
Figure 8.27: Comparison <strong>of</strong> first and second-order unrestrained surge motion <strong>for</strong> the semi-submersible plat<strong>for</strong>m <strong>for</strong> three<br />
monochromatic waves.<br />
unrestrained motion (pitch) [deg]<br />
0.03<br />
0.02<br />
0.01<br />
0<br />
-0.01<br />
Monochromatic wave (T=5 s; H=1 m)<br />
-0.02<br />
0 5 10 15<br />
Time [s]<br />
unrestrained motion (pitch) [deg]<br />
0.1<br />
0.05<br />
0<br />
-0.05<br />
-0.1<br />
Monochromatic wave (T=7 s; H=2 m)<br />
-0.15<br />
0 5 10 15 20 25<br />
Time [s]<br />
unrestrained motion (pitch) [deg]<br />
0.5<br />
0<br />
Monochromatic wave (T=9 s; H=4 m)<br />
-0.5<br />
0 5 10 15<br />
Time [s]<br />
20 25 30<br />
Figure 8.28: Comparison <strong>of</strong> first and second-order unrestrained pitch motion <strong>for</strong> the semi-submersible plat<strong>for</strong>m <strong>for</strong> three<br />
monochromatic waves.<br />
Second-order hydrodynamic loads and unrestrained motions <strong>for</strong> mixed seas<br />
This section presents comparisons between first and second-order excitation <strong>for</strong>ces and unrestrained motions<br />
<strong>for</strong> the semi-submersible plat<strong>for</strong>m, <strong>for</strong> three sea states described by Pierson-Moskowitz distributions with the<br />
parameters listed in Table 8.16. The absolute values <strong>of</strong> the sum- and difference- frequency <strong>for</strong>ce QTFs ( ,<br />
) <strong>for</strong> the semi-submersible plat<strong>for</strong>m in the six modes <strong>of</strong> motion can be found in Appendix B <strong>of</strong> [111].<br />
Pierson-Moskowitz spectrum with Hs=0.5 m<br />
The comparisons between first and second-order excitation <strong>for</strong>ces in the six modes <strong>of</strong> motion (surge, sway,<br />
heave, roll, pitch and yaw) <strong>for</strong> the semi-submersible plat<strong>for</strong>m associated with this spectrum are presented in<br />
Figure 8.29. For this spectrum and <strong>for</strong> all modes, the second-order excitation <strong>for</strong>ces are dominant relative to<br />
the first-order excitation <strong>for</strong>ces.<br />
The comparisons <strong>of</strong> the first and second-order unrestrained motions in the six modes <strong>for</strong> this spectrum are<br />
shown in Figure 8.30. The unrestrained motions are small in all modes. Slow drift motions can be identified in<br />
all modes except heave. For surge, pitch and yaw, the second-order component <strong>of</strong> the unrestrained motions is<br />
<strong>of</strong> the same order <strong>of</strong> importance as the first-order. For the other modes (sway, heave and roll) the second-order<br />
component is dominant over the first-order.








