

Final report for WP4.3: Enhancement of design methods ... - Upwind
Final report for WP4.3: Enhancement of design methods ... - Upwind
Final report for WP4.3: Enhancement of design methods ... - Upwind

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
• Time domain simulation in ADCoS-Offshore.<br />
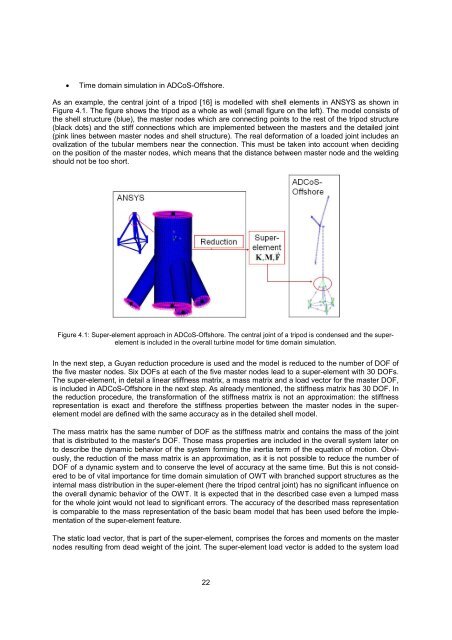
As an example, the central joint <strong>of</strong> a tripod [16] is modelled with shell elements in ANSYS as shown in<br />
Figure 4.1. The figure shows the tripod as a whole as well (small figure on the left). The model consists <strong>of</strong><br />
the shell structure (blue), the master nodes which are connecting points to the rest <strong>of</strong> the tripod structure<br />
(black dots) and the stiff connections which are implemented between the masters and the detailed joint<br />
(pink lines between master nodes and shell structure). The real de<strong>for</strong>mation <strong>of</strong> a loaded joint includes an<br />
ovalization <strong>of</strong> the tubular members near the connection. This must be taken into account when deciding<br />
on the position <strong>of</strong> the master nodes, which means that the distance between master node and the welding<br />
should not be too short.<br />
Figure 4.1: Super-element approach in ADCoS-Offshore. The central joint <strong>of</strong> a tripod is condensed and the superelement<br />
is included in the overall turbine model <strong>for</strong> time domain simulation.<br />
In the next step, a Guyan reduction procedure is used and the model is reduced to the number <strong>of</strong> DOF <strong>of</strong><br />
the five master nodes. Six DOFs at each <strong>of</strong> the five master nodes lead to a super-element with 30 DOFs.<br />
The super-element, in detail a linear stiffness matrix, a mass matrix and a load vector <strong>for</strong> the master DOF,<br />
is included in ADCoS-Offshore in the next step. As already mentioned, the stiffness matrix has 30 DOF. In<br />
the reduction procedure, the trans<strong>for</strong>mation <strong>of</strong> the stiffness matrix is not an approximation: the stiffness<br />
representation is exact and there<strong>for</strong>e the stiffness properties between the master nodes in the superelement<br />
model are defined with the same accuracy as in the detailed shell model.<br />
The mass matrix has the same number <strong>of</strong> DOF as the stiffness matrix and contains the mass <strong>of</strong> the joint<br />
that is distributed to the master's DOF. Those mass properties are included in the overall system later on<br />
to describe the dynamic behavior <strong>of</strong> the system <strong>for</strong>ming the inertia term <strong>of</strong> the equation <strong>of</strong> motion. Obviously,<br />
the reduction <strong>of</strong> the mass matrix is an approximation, as it is not possible to reduce the number <strong>of</strong><br />
DOF <strong>of</strong> a dynamic system and to conserve the level <strong>of</strong> accuracy at the same time. But this is not considered<br />
to be <strong>of</strong> vital importance <strong>for</strong> time domain simulation <strong>of</strong> OWT with branched support structures as the<br />
internal mass distribution in the super-element (here the tripod central joint) has no significant influence on<br />
the overall dynamic behavior <strong>of</strong> the OWT. It is expected that in the described case even a lumped mass<br />
<strong>for</strong> the whole joint would not lead to significant errors. The accuracy <strong>of</strong> the described mass representation<br />
is comparable to the mass representation <strong>of</strong> the basic beam model that has been used be<strong>for</strong>e the implementation<br />
<strong>of</strong> the super-element feature.<br />
The static load vector, that is part <strong>of</strong> the super-element, comprises the <strong>for</strong>ces and moments on the master<br />
nodes resulting from dead weight <strong>of</strong> the joint. The super-element load vector is added to the system load<br />
22








