CAPÍTULO 7. Cuerpo rígido - Biblioteca
CAPÍTULO 7. Cuerpo rígido - Biblioteca
CAPÍTULO 7. Cuerpo rígido - Biblioteca

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Cuerpo</strong> <strong>rígido</strong> Hugo Medina Guzmán<br />
extremos que se mantiene fijo, bajo la acción de su<br />
peso. Escriba la ecuación diferencial para el ángulo<br />
que ella gira.<br />
Solución.<br />
Por conservación de energía<br />
11 • 2<br />
2 L<br />
E = ML θ − Mg cos<br />
23<br />
2<br />
θ<br />
Derivando respecto al tiempo<br />
1 • ••<br />
2 L •<br />
ML θ θ + Mg θ senθ<br />
= 0<br />
3<br />
2<br />
Finalmente<br />
••<br />
3g<br />
θ + senθ<br />
= 0<br />
2L<br />
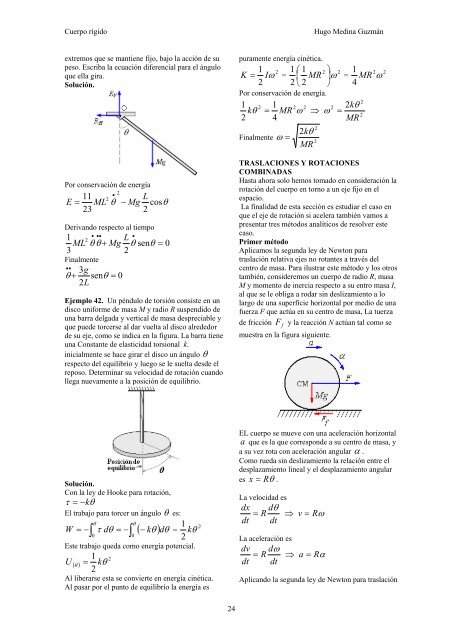
Ejemplo 42. Un péndulo de torsión consiste en un<br />
disco uniforme de masa M y radio R suspendido de<br />
una barra delgada y vertical de masa despreciable y<br />
que puede torcerse al dar vuelta al disco alrededor<br />
de su eje, como se indica en la figura. La barra tiene<br />
una Constante de elasticidad torsional k.<br />
inicialmente se hace girar el disco un ángulo θ<br />
respecto del equilibrio y luego se le suelta desde el<br />
reposo. Determinar su velocidad de rotación cuando<br />
llega nuevamente a la posición de equilibrio.<br />
Solución.<br />
Con la ley de Hooke para rotación,<br />
τ = −kθ<br />
El trabajo para torcer un ángulo θ es:<br />
θ<br />
θ<br />
1 2<br />
W = −∫<br />
τ dθ<br />
= −∫<br />
( − kθ<br />
) dθ<br />
= k θ<br />
0<br />
0<br />
2<br />
Este trabajo queda como energía potencial.<br />
1 2<br />
U ( θ ) = kθ<br />
2<br />
Al liberarse esta se convierte en energía cinética.<br />
Al pasar por el punto de equilibrio la energía es<br />
24<br />
puramente energía cinética.<br />
1 2 1 ⎛ 1 2 ⎞ 2 1<br />
K = Iω<br />
= ⎜ MR ⎟ω<br />
= MR<br />
2 2 ⎝ 2 ⎠ 4<br />
Por conservación de energía.<br />
2<br />
1 2 1 2 2 2 2kθ<br />
k θ = MR ω ⇒ ω = 2<br />
2 4<br />
MR<br />
Finalmente<br />
ω =<br />
2<br />
2kθ<br />
2<br />
MR<br />
2<br />
ω<br />
TRASLACIONES Y ROTACIONES<br />
COMBINADAS<br />
Hasta ahora solo hemos tomado en consideración la<br />
rotación del cuerpo en torno a un eje fijo en el<br />
espacio.<br />
La finalidad de esta sección es estudiar el caso en<br />
que el eje de rotación si acelera también vamos a<br />
presentar tres métodos analíticos de resolver este<br />
caso.<br />
Primer método<br />
Aplicamos la segunda ley de Newton para<br />
traslación relativa ejes no rotantes a través del<br />
centro de masa. Para ilustrar este método y los otros<br />
también, consideremos un cuerpo de radio R, masa<br />
M y momento de inercia respecto a su entro masa I,<br />
al que se le obliga a rodar sin deslizamiento a lo<br />
largo de una superficie horizontal por medio de una<br />
fuerza F que actúa en su centro de masa, La tuerza<br />
de fricción F f y la reacción N actúan tal como se<br />
muestra en la figura siguiente.<br />
EL cuerpo se mueve con una aceleración horizontal<br />
a que es la que corresponde a su centro de masa, y<br />
a su vez rota con aceleración angular α .<br />
Como rueda sin deslizamiento la relación entre el<br />
desplazamiento lineal y el desplazamiento angular<br />
es x = Rθ<br />
.<br />
La velocidad es<br />
dx dθ<br />
= R ⇒ v = Rω<br />
dt dt<br />
La aceleración es<br />
dv dω<br />
= R ⇒ a = Rα<br />
dt dt<br />
Aplicando la segunda ley de Newton para traslación<br />
2