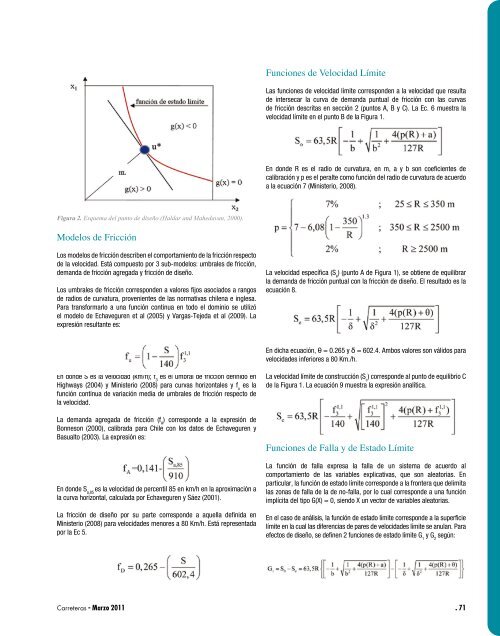
EL MODELO DE FRICCION DE 3 ZONASEl análisis <strong>de</strong> confiabilidad se fundamenta en la construcción <strong>de</strong> funciones<strong>de</strong> falla, a partir <strong>de</strong> las cuales se <strong>de</strong>termina el punto <strong>de</strong> diseño que maximizael índice <strong>de</strong> confiabilidad <strong>de</strong> Hasofer – Lind (1974) para funciones <strong>de</strong> fallano-normales y no-lineales (Haldar and Maha<strong>de</strong>van, 2000). Un aspectoesencial <strong>de</strong>l método es el mo<strong>de</strong>lo conceptual bajo el cual se formulan lasfunciones <strong>de</strong> falla, <strong>de</strong>nominado mo<strong>de</strong>lo <strong>de</strong> fricción <strong>de</strong> 3 zonas para curvashorizontales.Este mo<strong>de</strong>lo explica bajo un concepto unificado <strong>de</strong> relaciones fricción –velocidad – radio en el cual se superponen funciones <strong>de</strong> <strong>de</strong>manda agregada<strong>de</strong> fricción, <strong>de</strong> fricción <strong>de</strong> diseño, umbrales <strong>de</strong> fricción y oferta <strong>de</strong> fricción.Este concepto se muestra en Figura 1. Dicha Figura muestra en un sólográfico el comportamiento <strong>de</strong> diversos tipos <strong>de</strong> fricción respecto <strong>de</strong> lavelocidad.La <strong>de</strong>manda agregada <strong>de</strong> fricción correspon<strong>de</strong> a la <strong>de</strong>manda <strong>de</strong> fricción <strong>de</strong>todos los conductores. Refleja la relación <strong>de</strong> compensación <strong>de</strong> velocidadque aplican los conductores antes diferentes radios, peraltes y valores <strong>de</strong>fricción en un sentido espacial en la red vial.La fricción <strong>de</strong> diseño correspon<strong>de</strong> a valores <strong>de</strong> fricción lateral obtenidosmediante mediciones <strong>de</strong> terreno basadas en el equipo Ball Bank (AASHTO,2001). Refleja el valor límite sobre el cual el conductor y los ocupantes <strong>de</strong>los vehículos sienten incomodidad producto <strong>de</strong> la aceleración lateral.MODELACION DE FUNCION DE ESTADO LÍMITEMétodo <strong>de</strong> Cálculo <strong>de</strong> ConfiabilidadLewis (1987) <strong>de</strong>fine la confiabilidad como la probabilidad <strong>de</strong> que uncomponente, mecanismo equipo o sistema opere bajo ciertas condicionespor un período <strong>de</strong> tiempo <strong>de</strong>terminado. En términos matemáticos,correspon<strong>de</strong> a la función inversa <strong>de</strong> la probabilidad <strong>de</strong> falla. En el diseñogeométrico, los elementos que intervienen para estimar esta probabilidadson las relaciones entre las velocida<strong>de</strong>s límites las cuales están en función<strong>de</strong>l radio <strong>de</strong> curvatura.Sean las funciones <strong>de</strong> falla G 1y G 2no lineales y aleatorias tales que: G 1=f 1(X) y G 2= f 2(X), siendo X el vector <strong>de</strong> variables aleatorias que <strong>de</strong>scribenlas características geométricas. Sea la función <strong>de</strong> estado límite la funcióng(X) = G 1- G 2= f 1(X) - f 2(X). La probabilidad <strong>de</strong> falla (Pf) se <strong>de</strong>fine con laprobabilidad que g(X) sea menor o igual a 0: P(g(X) ≤ 0). En este caso, ellugar geométrico <strong>de</strong> todos los puntos X que cumplen la condición límiteg(X)=0 representa el estado límite que separa las zonas <strong>de</strong> falla y <strong>de</strong> nofalla.Si g(x) es una función lineal y las variables aleatorias siguen unadistribución <strong>de</strong> probabilida<strong>de</strong>s normal y no están correlacionadas, entoncesla probabilidad <strong>de</strong> falla pue<strong>de</strong> <strong>de</strong>scribirse según la expresión 1.Don<strong>de</strong> β es el índice <strong>de</strong> confiabilidad, μ y σ son la media y <strong>de</strong>sviaciónestándar <strong>de</strong> la función g(X) a ison constantes <strong>de</strong>terminísticas, μ Xiy σ Xisonla media y la <strong>de</strong>sviación estándar <strong>de</strong> X. Si a 0= 0; i = 2; a i= 1, se llega a laexpresión <strong>de</strong> margen <strong>de</strong> seguridad asociado a resistencias y solicitacionesque se usa habitualmente ingeniería.Figura 1. Mo<strong>de</strong>lo <strong>de</strong> 3 zonas en curvas horizontales (De Solminihac et al,2007).El umbral <strong>de</strong> fricción por su parte, correspon<strong>de</strong> a valores objetivo <strong>de</strong> fricciónque <strong>de</strong>pen<strong>de</strong>n <strong>de</strong> la maniobra y <strong>de</strong>l elemento geométrico. De modo talque para diversos rangos <strong>de</strong> radio <strong>de</strong> curvatura, los valores reflejan unacondición última <strong>de</strong>ntro <strong>de</strong>l rango <strong>de</strong> incomodidad <strong>de</strong>l conductor, pero quees inferior a la máxima fricción que proporciona el pavimento. Esta máximafricción correspon<strong>de</strong> a la oferta <strong>de</strong> fricción.Finalmente, la <strong>de</strong>manda puntual <strong>de</strong> fricción respon<strong>de</strong> a la condición <strong>de</strong>estabilidad dinámica <strong>de</strong> un vehículo que se <strong>de</strong>splaza por una curva <strong>de</strong> radioy peralte <strong>de</strong>terminado, a una velocidad <strong>de</strong>terminada.A partir <strong>de</strong> este mo<strong>de</strong>lo unificado, se <strong>de</strong>finieron 3 zonas <strong>de</strong> diseño: unazona <strong>de</strong> consistencia operacional (Zona 1), una <strong>de</strong> consistencia constructiva(Zona 2) y otra <strong>de</strong> consistencia <strong>de</strong> umbrales <strong>de</strong> fricción (Zona 3). La primerapermite construir funciones <strong>de</strong> falla relacionando velocidad específicacon velocidad <strong>de</strong> operación (Puntos A y B), la segunda velocidad límite<strong>de</strong> construcción con velocidad <strong>de</strong> operación (Puntos B y C), y la terceravelocidad limite <strong>de</strong> construcción con velocidad máxima asociada a larelación entre umbrales <strong>de</strong> fricción y oferta <strong>de</strong> fricción (Puntos C y D).En el caso en estudio la función g(X) es no lineal, y las distribuciones <strong>de</strong>probabilidad <strong>de</strong> las componentes <strong>de</strong> X son no normales. Por tal motivo, se<strong>de</strong>be utilizar un método alternativo al <strong>de</strong>scrito por la ecuación 1. En estecaso se seleccionó el método <strong>de</strong> Hasofer-Lind, el cual linealiza la función<strong>de</strong> estado límite en el punto <strong>de</strong> diseño, <strong>de</strong>finiendo β como la mínimadistancia entre el origen <strong>de</strong>l sistema <strong>de</strong> coor<strong>de</strong>nadas y el punto <strong>de</strong> diseñolocalizado sobre la función <strong>de</strong> estado límite g(X)=0. De este modo el índice<strong>de</strong> confiabilidad se estima en base a la ecuación 2 (Hasofer and Lind, 1974).En don<strong>de</strong> u ies la variable x inormalizada, α es el vector normalizado que<strong>de</strong>scribe la función g(u) = 0 en el punto <strong>de</strong> diseño u*. La Figura 2 ilustragráficamente el punto <strong>de</strong> diseño. La ecuación 2 se resuelve numéricamenteo mediante software <strong>de</strong> análisis <strong>de</strong> confiabilidad.. 70<strong>Carreteras</strong> - Marzo 2011
Funciones <strong>de</strong> Velocidad LímiteLas funciones <strong>de</strong> velocidad límite correspon<strong>de</strong>n a la velocidad que resulta<strong>de</strong> intersecar la curva <strong>de</strong> <strong>de</strong>manda puntual <strong>de</strong> fricción con las curvas<strong>de</strong> fricción <strong>de</strong>scritas en sección 2 (puntos A, B y C). La Ec. 6 muestra lavelocidad límite en el punto B <strong>de</strong> la Figura 1.En don<strong>de</strong> R es el radio <strong>de</strong> curvatura, en m, a y b son coeficientes <strong>de</strong>calibración y p es el peralte como función <strong>de</strong>l radio <strong>de</strong> curvatura <strong>de</strong> acuerdoa la ecuación 7 (Ministerio, 2008).Figura 2. Esquema <strong>de</strong>l punto <strong>de</strong> diseño (Haldar and Mahedavan, 2000).Mo<strong>de</strong>los <strong>de</strong> FricciónLos mo<strong>de</strong>los <strong>de</strong> fricción <strong>de</strong>scriben el comportamiento <strong>de</strong> la fricción respecto<strong>de</strong> la velocidad. Está compuesto por 3 sub-mo<strong>de</strong>los: umbrales <strong>de</strong> fricción,<strong>de</strong>manda <strong>de</strong> fricción agregada y fricción <strong>de</strong> diseño.Los umbrales <strong>de</strong> fricción correspon<strong>de</strong>n a valores fijos asociados a rangos<strong>de</strong> radios <strong>de</strong> curvatura, provenientes <strong>de</strong> las normativas chilena e inglesa.Para transformarlo a una función continua en todo el dominio se utilizóel mo<strong>de</strong>lo <strong>de</strong> Echaveguren et al (2005) y Vargas-Tejeda et al (2009). Laexpresión resultante es:La velocidad específica (S e) (punto A <strong>de</strong> Figura 1), se obtiene <strong>de</strong> equilibrarla <strong>de</strong>manda <strong>de</strong> fricción puntual con la fricción <strong>de</strong> diseño. El resultado es laecuación 8.En dicha ecuación, θ = 0.265 y δ = 602.4. Ambos valores son válidos paravelocida<strong>de</strong>s inferiores a 80 Km./h.En don<strong>de</strong> S es la velocidad (km/h); f 3es el umbral <strong>de</strong> fricción <strong>de</strong>finido enHighways (2004) y Ministerio (2008) para curvas horizontales y f ues lafunción continua <strong>de</strong> variación media <strong>de</strong> umbrales <strong>de</strong> fricción respecto <strong>de</strong>la velocidad.La <strong>de</strong>manda agregada <strong>de</strong> fricción (f A) correspon<strong>de</strong> a la expresión <strong>de</strong>Bonneson (2000), calibrada para Chile con los datos <strong>de</strong> Echaveguren yBasualto (2003). La expresión es:En don<strong>de</strong> S a,85es la velocidad <strong>de</strong> percentil 85 en km/h en la aproximación ala curva horizontal, calculada por Echaveguren y Sáez (2001).La fricción <strong>de</strong> diseño por su parte correspon<strong>de</strong> a aquella <strong>de</strong>finida enMinisterio (2008) para velocida<strong>de</strong>s menores a 80 Km/h. Está representadapor la Ec 5.La velocidad límite <strong>de</strong> construcción (S c) correspon<strong>de</strong> al punto <strong>de</strong> equilibrio C<strong>de</strong> la Figura 1. La ecuación 9 muestra la expresión analítica.Funciones <strong>de</strong> Falla y <strong>de</strong> Estado LímiteLa función <strong>de</strong> falla expresa la falla <strong>de</strong> un sistema <strong>de</strong> acuerdo alcomportamiento <strong>de</strong> las variables explicativas, que son aleatorias. Enparticular, la función <strong>de</strong> estado límite correspon<strong>de</strong> a la frontera que <strong>de</strong>limitalas zonas <strong>de</strong> falla <strong>de</strong> la <strong>de</strong> no-falla, por lo cual correspon<strong>de</strong> a una funciónimplícita <strong>de</strong>l tipo G(X) = 0, siendo X un vector <strong>de</strong> variables aleatorias.En el caso <strong>de</strong> análisis, la función <strong>de</strong> estado límite correspon<strong>de</strong> a la superficielímite en la cual las diferencias <strong>de</strong> pares <strong>de</strong> velocida<strong>de</strong>s límite se anulan. Paraefectos <strong>de</strong> diseño, se <strong>de</strong>finen 2 funciones <strong>de</strong> estado límite G 1y G 2según:<strong>Carreteras</strong> - Marzo 2011. 71