DM_RAP_COMBI_rev03 IN LAVORO.pmd - Opico
DM_RAP_COMBI_rev03 IN LAVORO.pmd - Opico
DM_RAP_COMBI_rev03 IN LAVORO.pmd - Opico

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ITALIANO ENGLISH FRANÇAIS DEUTSCH<br />
ESPAÑOL<br />
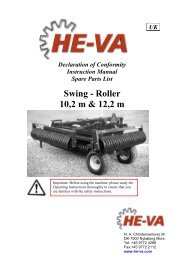
A perni<br />
Questo tipo di regolazione permette di<br />
lavorare in due modi distinti.<br />
1) Profondità di lavoro fissa:<br />
Dopo aver stabilito la profondità di<br />
lavoro più idonea, si posizionano i<br />
perni (1 e 2 Fig. 53 vers.Combi - 1 e<br />
2 Fig.56 vers.Standard) nei fori immediatamente<br />
sopra e sotto il braccio<br />
di collegamento rullo (3 Fig. 53 vers.<br />
Combi - 3 Fig.56 vers.Standard). In<br />
questo modo i coltelli della macchina<br />
affondano e lavorano il terreno ad una<br />
profondità costante mantenuta dalla<br />
spinatura dei perni che garantiscono<br />
la posizione del rullo come fi ssata.<br />
2) Profondità di lavoro variabile (oscillante):<br />
A differenza della precedente il perno<br />
(2 Fig. 54 vers.Combi - 2 Fig.56<br />
vers. Standard ) potrebbe anche non<br />
esserci, oppure posizionato nei fori<br />
più bassi in modo tale da garantire<br />
una certa oscillazione al braccio (3<br />
Fig. 54 vers.Combi - 3 Fig.56 vers.<br />
Standard).<br />
La possibilità di movimento del braccio<br />
consente alla macchina, qualora<br />
durante la lavorazione incontrasse<br />
un’ostacolo, di sormontarlo senza<br />
danni per il rullo, poiché il braccio<br />
stesso, non essendo bloccato dai<br />
perni, può muoversi entro il campo<br />
di oscillazione fi ssato dalla spinatura<br />
1<br />
By pins<br />
This type of adjustment allows you to<br />
work in two distinct ways.<br />
1) Fixed tilling depth:<br />
After having established the most suitable<br />
tilling depth, set the pins (1 and<br />
2 pic. 53 Combi version - 1 e 2 Pic.<br />
56 Standard version) in the holes immediately<br />
above and below the roller<br />
connecting arm (3 Pic. 53 <strong>COMBI</strong><br />
vers. - 3 Pic.56 STANDARD vers.).<br />
This allows the knives of the implement<br />
to dig into the soil and work it at<br />
a constant depth maintained by the<br />
position of the pins, which guarantee<br />
the fi xed roller setting.<br />
2) Variable tilling depth (swinging):<br />
Unlike the previous method, the pin<br />
is either not needed (2 Pic.54 <strong>COMBI</strong><br />
vers. - 2 Pic.56 STANDARD vers.) or<br />
can be set in the lowest holes, so as<br />
to allow the arm to swing to a certain<br />
extent (3 Fig. 54 Combi vers. - 3<br />
Fig.56 Standard vers.).<br />
As the arm can move , the machine<br />
can ride over any obstructions encountered<br />
during the tillage operations<br />
without the roller being damaged,<br />
as the actual arm moves within the<br />
swinging range established by the<br />
positions of the pins , since it is no<br />
longer blocked by these latter.<br />
Moreover, the advantage of «variable<br />
depth» tillage is that it obtains a more<br />
Par broches<br />
Ce type de réglage permet de travailler<br />
de deux manières différentes.<br />
1) Profondeur de travail fixe:<br />
Après avoir établi la profondeur de travail<br />
appropriée, on positionne les broches<br />
(1 et 2 image 53 vers.Combi - 1<br />
et 2 image 56 vers.Standard) dans les<br />
trous immédiatement au-dessus et audessous<br />
du bras de liaison du rouleau<br />
(3 Fig. 53 vers.Combi - 3 Fig.56 vers.<br />
Standard). Les couteaux de la machine<br />
peuvent ainsi s’enfoncer et préparer le<br />
sol à une profondeur constante maintenue<br />
par le brochage qui garantit la<br />
position de réglage choisi du rouleau.<br />
2) Profondeur de travail variable (oscillant):<br />
Contrairement au réglage précédent, la<br />
broche (2 Fig. 54 ver.Combi - 2 Fig.56<br />
vers. Standard) pourrait même ne pas<br />
y être ou être placée dans les trous<br />
plus bas de manière à garantir une<br />
certaine oscillation du bras (3 Fig.54<br />
vers.Combi - 3 Fig.56 ver.Standard).<br />
La liberté de mouvement du bras<br />
permet à la machine, au cas où celle-ci<br />
rencontre un obstacle pendant<br />
le travail, de le surmonter sans endommager<br />
le rouleau, puisque le bras<br />
qui n’est pas bloqué par les broches<br />
comme dans le réglage de «profondeur<br />
fixe» peut se déplacer dans la plage<br />
d’oscillation fixée par le brochage des<br />
axes. En outre la «profondeur varia-<br />
Mit Bolzen<br />
Mit dieser Einstellungsart kann man auf<br />
zwei verschiedene Weisen arbeiten.<br />
1) Feste Arbeitstiefe:<br />
Nachdem man die am besten geeignete<br />
Arbeitstiefe festgelegt hat,<br />
positioniert man die Bolzen (1 und 2<br />
Abb. 53 Combi Vers. - 1 und 2 Abb.<br />
56Standard Vers.) in den Löchern<br />
unmittelbar über und unter dem Walzenverbindungsarm<br />
(3 Abb. 53 Combi<br />
Vers. - 3 Abb. 56 Standard Vers.). Auf<br />
diese Weise senken sich die Messe<br />
der Maschine in den Boden ein und<br />
bearbeiten den Boden mit einer Tiefe,<br />
die durch die Verstiftung der Bolzen<br />
konstant gehalten wird, was eine feste<br />
Position der Walze gewährleistet.<br />
2) Variable Arbeitstiefe (schwankend):<br />
Im Unterschied zur vorherigen Einstellung<br />
kann der Bolzen (2 Abb. 54<br />
Combi Vers. - 2 Abb. 56 Standard<br />
Vers. ) auch nicht vorhanden sein<br />
oder sich in den Löchern ganz unten<br />
befi nden, um dem Arm (3 Abb. 54<br />
Combi Version - 3 Abb. 56 Standard<br />
Vers.) ein gewisses Ausschwingen zu<br />
gewährleisten.<br />
Die Bewegungsmöglichkeit des Arms<br />
gestattet es der Maschine, falls sie<br />
bei der Arbeit ein Hindernis vorfi ndet,<br />
dieses zu überwinden, ohne die Walze<br />
zu beschädigen, weil der Arm nicht<br />
wie bei der «festen Arbeitstiefe» durch<br />
die Bolzen blockiert wird und sich daher<br />
frei in einem Oszillationsbereich<br />
bewegen kann, der durch die Ver-<br />
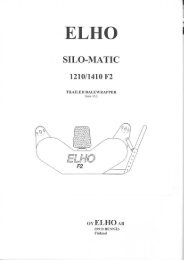
STANDARD STANDARD STANDARD<br />
1<br />
1<br />
De pernos<br />
Este tipo de regulación permite trabajar<br />
en dos maneras diferentes:<br />
1) Profundidad de trabajo fija:<br />
Después de haber establecido la<br />
profundidad de trabajo más idónea,<br />
se ubican los pernos (1 y 2 Foto<br />
53vers.Combi - 1 y 2 Foto 56 vers.<br />
Standard) en los agujeros de arriba<br />
y abajo del brazo de conexión rodillo<br />
(3 Foto 53 vers. Combi - 3 Foto 56<br />
vers. Standard). De esta manera las<br />
cuchillas de la máquina se hunden en<br />
el terreno efectuando el laboreo a una<br />
profundidad constante, mantenida gracias<br />
al escariado de los pernos, lo que<br />
garantiza la posición fija del rodillo.<br />
2) Profundidad de trabajo variable<br />
(oscilante):<br />
A diferencia de la regulación precedente,<br />
el perno (2 Foto 54 vers.Combi - 2<br />
Foto 56 vers.Standard) podría inclusive<br />
faltar, o bien podría estar ubicado<br />
en los agujeros más bajos en modo<br />
tal que permita una cierta oscilación al<br />
brazo (3 Foto54 vers. Combi - 3 Foto<br />
56 vers.Standard).<br />
La posibilidad de movimiento del brazo<br />
permite a la máquina la posibilidad, si<br />
durante el laboreo encontrara un obstáculo,<br />
de desmontarlo sin daños para<br />
el rodillo, puesto que el brazo mismo,<br />
no estando bloqueado con pernos<br />
puede moverse dentro del campo de<br />
oscilación fijado por el escariado de los<br />
pernos. En la modalidad de regulación<br />
con «profundidad variable» además se<br />
cuenta con la ventaja que se obtiene<br />
3<br />
2<br />
Fig. 55 Fig. 56 Fig. 57<br />
49