Verslag Regeltechniek 2
Verslag Regeltechniek 2
Verslag Regeltechniek 2

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4 PI-geregeld eerste orde systeem<br />
4.1 Inleiding<br />
De volgende regelaar die we zullen behandelen betreft een PI-regelaar eerste orde systeem.<br />
De PI- regelaar heeft er dus een extra I-actie bij gekregen ten opzichte van de hiervoor<br />
beschreven P-regelaar.<br />
4.2 Blokschema<br />
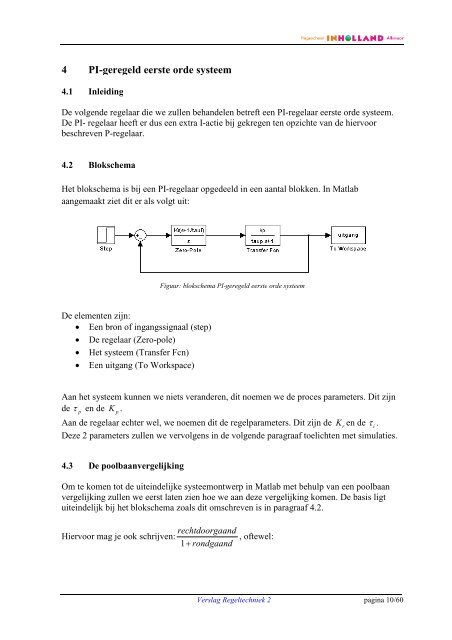
Het blokschema is bij een PI-regelaar opgedeeld in een aantal blokken. In Matlab<br />
aangemaakt ziet dit er als volgt uit:<br />
De elementen zijn:<br />
Een bron of ingangssignaal (step)<br />
De regelaar (Zero-pole)<br />
Het systeem (Transfer Fcn)<br />
Een uitgang (To Workspace)<br />
Figuur: blokschema PI-geregeld eerste orde systeem<br />
Aan het systeem kunnen we niets veranderen, dit noemen we de proces parameters. Dit zijn<br />
K .<br />
de p en de p<br />
Aan de regelaar echter wel, we noemen dit de regelparameters. Dit zijn de r K en de i .<br />
Deze 2 parameters zullen we vervolgens in de volgende paragraaf toelichten met simulaties.<br />
4.3 De poolbaanvergelijking<br />
Om te komen tot de uiteindelijke systeemontwerp in Matlab met behulp van een poolbaan<br />
vergelijking zullen we eerst laten zien hoe we aan deze vergelijking komen. De basis ligt<br />
uiteindelijk bij het blokschema zoals dit omschreven is in paragraaf 4.2.<br />
rechtdoorgaand<br />
Hiervoor mag je ook schrijven: , oftewel:<br />
1<br />
rondgaand<br />
<strong>Verslag</strong> <strong>Regeltechniek</strong> 2 pagina 10/60