Verslag Regeltechniek 2
Verslag Regeltechniek 2
Verslag Regeltechniek 2

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
6 PI-geregeld tweede orde systeem<br />
6.1 Inleiding<br />
De volgende regelaar die we zullen behandelen betreft een PI-regelaar van een tweede orde<br />
systeem.<br />
Aan het systeem kunnen we niets veranderen, dit noemen we de proces parameters. Dit zijn<br />
de p1,<br />
p2<br />
en de p<br />
K .<br />
Aan de regelaar daar echter wel; we noemen dit de regelparameters Kr en i .<br />
Het is de bedoeling dat er met verschillende waarden voor Kr en i gesimuleerd wordt, om<br />
zo de invloed aan te tonen van de Kr en i met betrekking op:<br />
snelheid<br />
nauwkeurigheid<br />
relatieve stabiliteit<br />
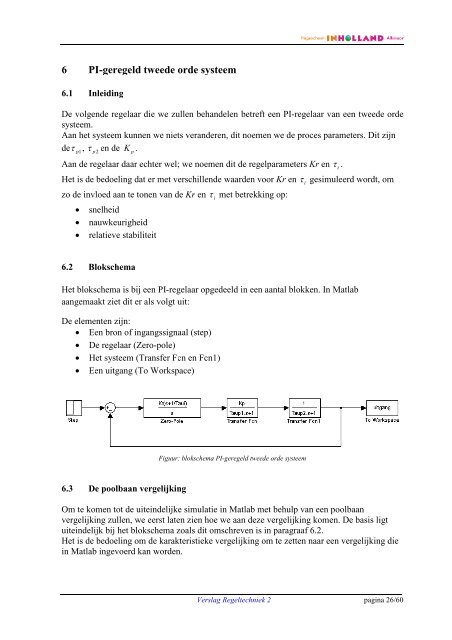
6.2 Blokschema<br />
Het blokschema is bij een PI-regelaar opgedeeld in een aantal blokken. In Matlab<br />
aangemaakt ziet dit er als volgt uit:<br />
De elementen zijn:<br />
Een bron of ingangssignaal (step)<br />
De regelaar (Zero-pole)<br />
Het systeem (Transfer Fcn en Fcn1)<br />
Een uitgang (To Workspace)<br />
6.3 De poolbaan vergelijking<br />
Figuur: blokschema PI-geregeld tweede orde systeem<br />
Om te komen tot de uiteindelijke simulatie in Matlab met behulp van een poolbaan<br />
vergelijking zullen, we eerst laten zien hoe we aan deze vergelijking komen. De basis ligt<br />
uiteindelijk bij het blokschema zoals dit omschreven is in paragraaf 6.2.<br />
Het is de bedoeling om de karakteristieke vergelijking om te zetten naar een vergelijking die<br />
in Matlab ingevoerd kan worden.<br />
<strong>Verslag</strong> <strong>Regeltechniek</strong> 2 pagina 26/60