Verslag Regeltechniek 2
Verslag Regeltechniek 2
Verslag Regeltechniek 2

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
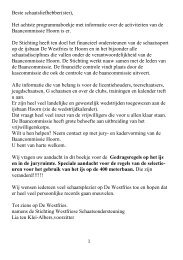
7.7 Samengestelde grafiek<br />
Om de verschillen tussen tweede orde systemen inzichtelijker te maken hebben we de P, PI<br />
en PID tweede orde systemen in 1 grafiek gezet. De waarden voor de regelparameters hebben<br />
we als volgt gekozen:<br />
Kr 1<br />
i 1<br />
a 0.5<br />
<br />
d 0.45<br />
De waarden van de systeemparameters zijn:<br />
<br />
K p 1<br />
<br />
p2<br />
2<br />
1 1 p <br />
De P- en PI tweede orde systemen hebben we in eerdere hoofdstukken met dezelfde waarden<br />
gesimuleerd; het PID systeem echter heeft afwijkende waarden voor wat betreft enkele<br />
parameters. Niet te min geeft het een aardig overzicht van de verschillen tussen de drie<br />
tweede orde systemen.<br />
Matlab genereert de volgende grafiek:<br />
Figuur: 3 regelaars in 1 grafiek<br />
<strong>Verslag</strong> <strong>Regeltechniek</strong> 2 pagina 49/60