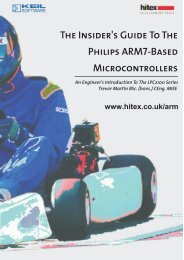
116 <strong>Poglavje</strong> 5. DINAMIKA - OBRAVNAVA MATERIALNIH TELES MED GIBANJEMyz 1 ω y m ′z 0z ω zOy 0 ⃗v 0x 0y 1referenčni k.s.x 1ω x⃗v⃗ωtrenutni k.s.xSlika 5.18: Primer togega telesa, ki se giblje in rotira v prostoruenaka kot referenčnemu (x 1 , y 1 , z 1 ). Podobno kot translacijsko hitrost tudi ⃗ω izrazimo v trenutnemkoordinatnem sistemu (x, y, z).Sedaj lahko napišemo komponente hitrosti masnega delca m ′ v x , v y in v z v trenutnem koordinatnemsistemu:v x= v ox + ω y z − ω z yv y = v oy + ω z x − ω x z (5.174)v z= v oz + ω x y − ω y xKar lahko napišemo v vektorski obliki⃗v = ⃗v o + ⃗ω × ⃗r (5.175)Te enačbe so veljavne tudi tedaj, kadar se koordinatni sistem x, y, z vrti glede na telo. Običajno pabo ta koordinatni sistem fiksiran glede na telo. V prvem primeru so x, y, z in vztrajnostni momentispremenljivke, v drugem pa konstante. Velikost in smer vektorja ⃗v o je v splošnem odvisna od izbireO. Vektor ⃗ω ima isto velikost in smer ne glede na položaj O na telesu. Razlog, da poskušamo izrazitihitrost masne točke v lokalnem koordinatnem sistemu, je v tem, da smemo zato uporabiti preprostejšeizražavo vztrajnostnih momentov.5.4.3 Kinetična energijaZgornje enačbe za hitrost predstavljajo osnovo za splošen zapis kinetične energije. Ta izraz dobimo,če hitrosti vstavimo v naslednjo enačbo:K = 1 2∑m′ ( v x 2 + v y 2 + v z2 ) (5.176)
5.4 LAGRANGEOVE ENAČBE ZA GIBANJE TOGEGA TELESA 117Če zberemo podobne člene dobimo:K = 1 2 M ( v 2 ox + v 2 oy + v ) 2oz ++ 1 2 ω ∑ x 2 m ( ′ y 2 + z 2) + 1 2 ω ∑ y 2 m ( ′ x 2 + z 2) + 1 2 ω ∑ z 2 m ( ′ x 2 + y 2) −∑ ∑ ∑− ω x ω y m ′ xy − ω x ω z m ′ xz − ω y ω z m ′ y z +∑ ∑ )+ v ox(ω y m ′ z − ω z m ′ y +∑ ∑ )+ v oy(ω z m ′ x − ω x m ′ z +∑ ∑ )+ v oz(ω x m ′ y − ω y m ′ x(5.177)Spomnimo se izrazov za vztrajnostne momente in označimo z x, y in z koordinate težišča telesa gledena neinercijski, t.j. trenutni koordinatni sistem:K = 1 2 M v o 2 ++ 1 ( )Jx ω 2 x + J y ω 2 y + J z ω 2 z − 2J xy ω x ω y − 2J xz ω x ω z − 2J yz ω y ω z +2 ()+ M v ox (ω y z − ω z y) + v oy (ω z x − ω x z) + v oz (ω x y − ω y ,x)(5.178)V izrazu za kinetično energijo sta kotna hitrost ⃗ω in linerana hitrost ⃗v o določeni glede na inercijskiprostor. Komponente obeh vektorjev pa so izražene v trenutnem koordinatnem sistemu (x, y, z). J x ,J xy ter x, y, z morajo tudi biti določeni v istem koordinatnem sistemu (x, y, z). Isti zahteva velja zax, y, z iz enačbe 5.177V primeru, da se sistem (x, y, z) rotira glede na telo, so x, y in z spremenljivke. To pomeni, dase med gibanjem spreminjajo izrazi J x , J xy ,. . . in x, y, z. To seveda vnaša dodatne komplikacije vdinamično analizo.Enačbo 5.178 moremo poenostaviti na različne načine:1. Običajno je sistem (x, y, z) fiksiran na telo, segment robota ali človeka. Zato so J x , J xy , . . . terx, y, z konstantni. Računamo jih le enkrat.2. Dodatno poenostavitev dosežemo, če postavimo izhodisče O sistema (x, y, z) v težišče. Takratvelja: x = y = z = 0 in zadnji člen v izrazu za kinetično energijo je potem enak nič.K = 1 2 M v o 2 ++ 1 2(Jx ω x 2 + J y ω y 2 + J z ω z 2 − 2J xy ω x ω y − 2J xz ω x ω z − 2J yz ω y ω z)(5.179)3. Največjo poenostavitev pa dobimo, če orientiramo še koordinatne osi sistema (x, y, z) tako,da sovpadajo s prostimi vztrajnostnimi osmi. Dobimo izraz, v katerem ni več deviacijskih