Mikrosenzory a mikromechanické systémy - Vysoké uÄÂenàtechnické ...
Mikrosenzory a mikromechanické systémy - Vysoké uÄÂenàtechnické ...
Mikrosenzory a mikromechanické systémy - Vysoké uÄÂenàtechnické ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
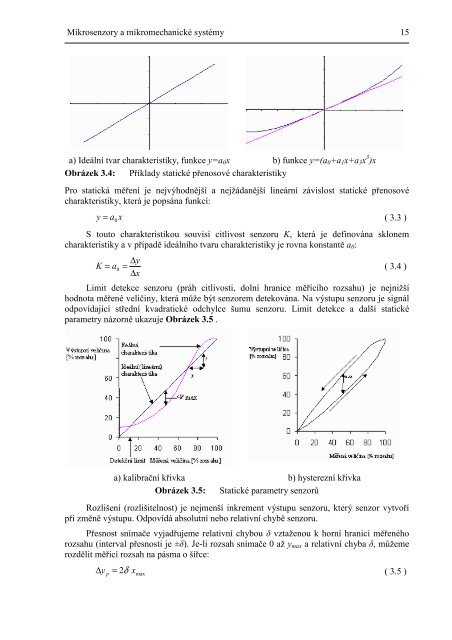
<strong>Mikrosenzory</strong> a mikromechanické systémy 15a) Ideální tvar charakteristiky, funkce y=a 0 x b) funkce y=(a 0 +a 1 x+a 3 x 3 )xObrázek 3.4: Příklady statické přenosové charakteristikyPro statická měření je nejvýhodnější a nejžádanější lineární závislost statické přenosovécharakteristiky, která je popsána funkcí:y0= a x( 3.3 )S touto charakteristikou souvisí citlivost senzoru K, která je definována sklonemcharakteristiky a v případě ideálního tvaru charakteristiky je rovna konstantě a 0 :∆yK = a 0=( 3.4 )∆xLimit detekce senzoru (práh citlivosti, dolní hranice měřícího rozsahu) je nejnižšíhodnota měřené veličiny, která může být senzorem detekována. Na výstupu senzoru je signálodpovídající střední kvadratické odchylce šumu senzoru. Limit detekce a další staticképarametry názorně ukazuje Obrázek 3.5 .a) kalibrační křivka b) hysterezní křivkaObrázek 3.5: Statické parametry senzorůRozlišení (rozlišitelnost) je nejmenší inkrement výstupu senzoru, který senzor vytvořípři změně výstupu. Odpovídá absolutní nebo relativní chybě senzoru.Přesnost snímače vyjadřujeme relativní chybou δ vztaženou k horní hranici měřenéhorozsahu (interval přesnosti je ±δ). Je-li rozsah snímače 0 až y max a relativní chyba δ, můžemerozdělit měřicí rozsah na pásma o šířce:∆ y p= 2δx max( 3.5 )