Wehrwissenschaftliche Forschung Jahresbericht 2012
Wehrwissenschaftliche Forschung Jahresbericht 2012
Wehrwissenschaftliche Forschung Jahresbericht 2012

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Forschung</strong>saktivitäten <strong>2012</strong> 38 39<br />
Dr. Dagi Geister<br />
Deutsches Zentrum für Luft- und<br />
Raumfahrt, Institut für Flugführung,<br />
Braunschweig<br />
dagi.geister@dlr.de<br />
Dr. Frederik Meysel<br />
Deutsches Zentrum für Luft- und<br />
Raumfahrt, Institut für Flugführung,<br />
Braunschweig<br />
frederik.meysel@dlr.de<br />
Dr. Bernd Korn<br />
Deutsches Zentrum für Luft- und<br />
Raumfahrt, Institut für Flugführung,<br />
Braunschweig<br />
bernd.korn@dlr.de<br />
Mensch-Maschine-Schnittstelle für UA-Schwarmführung<br />
Das Institut für Flugführung am Deutschen Zentrum für Ziel des <strong>Forschung</strong>sbereiches „Zukünftige Führungsfunktionen<br />
Luft- und Raumfahrt führt im Bereich „Zukünftige Führungsfunktionen<br />
für UAS“ verschiedene <strong>Forschung</strong>svorhaben manned Aircraft) weiter zu entwickeln sowie die Integrations-<br />
für UAS“ ist es, die Fähigkeiten und Funktionen von UA (Un-<br />
durch, deren Zielsetzung die Weiterentwicklung von Fähigkeiten<br />
und Funktionen für unbemannte Luftfahrzeuge ist. Luftraum zu erhöhen. Bei den Anforderungen an wehrtechfähigkeit<br />
von UAS (Unmanned Aircraft Systems) in den zivilen<br />
Der Kern der Arbeiten innerhalb dieses Vorhabens liegt in nische Systeme stehen hierbei der Schutz der Soldaten, eine<br />
dem Anwendungsfeld der UA-Schwarmführung.<br />
vernetzte Operationsführung sowie die weltweite Aufklärung<br />
an erster Stelle.<br />
Ein wesentlicher Bestandteil zukünftiger Führungsfunktionen<br />
und Fähigkeiten bei der Steuerung unbemannter Luftfahrzeuge<br />
sind insbesondere Funktionen zur UA-Schwarmführung.<br />
Eine effiziente Schwarmführung setzt eine optimale Aufgabenverteilung<br />
zwischen einzelnen UAS während einer Mission<br />
und eine verzugslose Auswertung gesammelter Sensordaten<br />
zur dynamischen Anpassung von Missionszielen voraus (Abbildung<br />
1).<br />
Die Basis zur Realisierung dieser Aufgaben bildet eine generische<br />
UA-Bodenkontrollstation (BKS). Eine BKS zur effizienten<br />
Planung, Durchführung und Auswertung von UAS-Missionen<br />
sollte auf einem universellen Verständnis existierender Interoperabilitäts-Standards<br />
basieren und sollte diese in den zur<br />
Verfügung gestellten Kontroll- und Führungsfunktionen realisieren.<br />
Die Interoperabilität in einem Gesamtsystem aus<br />
UA und C4I (Command, Control, Communication, Computers<br />
and Intelligence) erhöht nicht nur die Flexibilität und Effizienz<br />
über eine variable Einsetzbarkeit von alternativen Simulationsund<br />
<strong>Forschung</strong>sanlagen, sondern vereinfacht ebenfalls eine<br />
gemeinsame Auswertung und Verarbeitung von Missionsdaten.<br />
Dies bedeutet, dass die BKS auf Basis von einheitlichen<br />
Interoperabilitätsstandards (wie z. B. STANAG 4586) mit unterschiedlichen<br />
Typen an UA während einer Mission gekoppelt<br />
werden kann. Die BKS kann hierbei nicht nur verwendet werden,<br />
um die Mission eines einzelnen UA zu planen und deren<br />
Durchführung zu steuern, sondern beinhaltet zudem die<br />
Möglichkeit mehrere UA gleichzeitig i. S. d. Schwarmführung<br />
zu überwachen (Abbildung 2).<br />
Für verschiedene mögliche Formationen eines Schwarms<br />
können in der BKS schwarmfähige 4D-Trajektorien für die<br />
Missionsteile, die in Formation geflogen werden, generiert<br />
werden. Weiterhin wurden vordefinierte Landeverfahren<br />
(Standard Operating Procedures), die an die verwendeten<br />
Landeplätze, Betriebsrichtung, Platzrundenverkehr etc. in<br />
Echtzeit angepasst werden können, konzeptioniert. Die<br />
Grundfunktionalitäten wurden modular implementiert<br />
und in verschiedenen Simulationsstudien getestet. Unter<br />
Verwendung einer Schwarmtrajektorie und einer gegebenen<br />
Formation berechnet ein Modul Einzeltrajektorien aller UA<br />
(Abbildung 3).<br />
Das Verfahren zur Schwarmführung wird bei der letztlich angestrebten<br />
Technologiereife u. a. auch bei der Begegnung von<br />
Gruppen von UA mit anderen Luftfahrzeugen einsetzbar sein.<br />
In zukünftigen Versionen soll die Schwarmtrajektorie so abgeflogen<br />
werden können, dass z.B. in Kurven die Formation so<br />
koordiniert werden kann, dass durch den Wechsel von Echelon<br />
„links“ auf „rechts“ in einer Rechtskurve die Flugwege der<br />
einzelnen Luftfahrzeuge geringere Anforderungen an die<br />
Flugleistungen stellen und damit engere und effizientere<br />
Manöver möglich werden (Abbildung 4).<br />
Bei der Konzeption und Implementierung der Bodenkontrollstation<br />
wurde insbesondere auf eine intuitive Mensch-<br />
Maschine Schnittstelle für den UAS-Operator Wert gelegt.<br />
Um dies sicherzustellen, sind regelmäßige Evaluationen<br />
mit Anwendern eingeplant.<br />
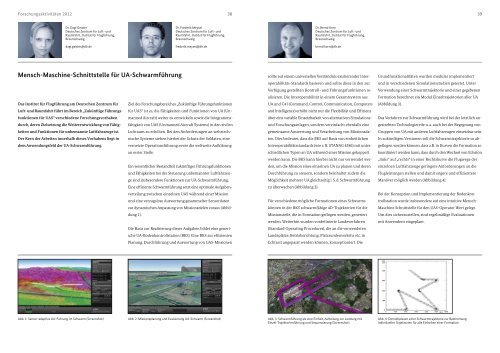
Abb. 1: Sensor-adaptive UA-Führung im Schwarm (Screenshot) Abb. 2: Missionsplanung und Evaluierung UA-Schwarm (Screenshot) Abb. 3: Schwarmführung als eine Einheit, Aufteilung zur Landung mit<br />
Abb. 4: Demultiplexen einer Schwarmtrajektorie zur Bestimmung<br />
Einzel-Trajektorienführung und Sequenzierung (Screenshot)<br />
individueller Trajektorien für alle Einheiten einer Formation