Wehrwissenschaftliche Forschung Jahresbericht 2012
Wehrwissenschaftliche Forschung Jahresbericht 2012
Wehrwissenschaftliche Forschung Jahresbericht 2012

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Forschung</strong>saktivitäten <strong>2012</strong> 50 51<br />
Hptm Dipl.-Wi.-Ing. Andreas Breitfeld<br />
Helmut-Schmidt-Universität /<br />
Universität der Bundeswehr, Hamburg,<br />
Fakultät für Maschinenbau<br />
M. Eng. Holger Freyer<br />
Helmut-Schmidt-Universität /<br />
Universität der Bundeswehr, Hamburg,<br />
Fakultät für Maschinenbau<br />
Prof. Dr.-Ing. Jens Wulfsberg<br />
Helmut-Schmidt-Universität /<br />
Universität der Bundeswehr, Hamburg,<br />
Fakultät für Maschinenbau<br />
Prof. Dr.-Ing. Rainer Bruns<br />
Helmut-Schmidt-Universität /<br />
Universität der Bundeswehr, Hamburg,<br />
Fakultät für Maschinenbau<br />
andreas.breitfeld@hsu-hh.de<br />
holger.freyer@hsu-hh.de<br />
jens.wulfsberg@hsu-hh.de<br />
rainer.bruns@hsu-hh.de<br />
Abstandsfähiges, bodengebundenes Lage-, Ziel- und<br />
Wirkungsaufklärungssystem WOERMS<br />
Mit dem Lage-, Ziel- und Wirkungsaufklärungssystem<br />
WOERMS (Wireless self-organised electrorheological Micro-<br />
Sensorsystem) wird durch das Institut für Konstruktionsund<br />
Fertigungstechnik der Helmut-Schmidt-Universität /<br />
Universität der Bundeswehr Hamburg ein abstandsfähiges,<br />
operatives Aufklärungsmittel für echtzeitnahe und durchhaltefähige<br />
Lage-, Ziel- und Wirkungsaufklärung vorrangig<br />
für urbanes Gelände entwickelt.<br />
Sowohl luftgestützte als auch bodengebundene unbemannte<br />
Aufklärungssysteme (AufklSys) spielen bei der Deckung des<br />
Informationsbedarfs der militärischen Führung in modernen<br />
Einsatzszenarien eine immer wichtiger werdende Rolle. Die<br />
Fähigkeit hochentwickelte, den menschlichen Sinnen überlegene<br />
Sensorik ohne Gefährdung eigener Kräfte einsetzen zu<br />
können, macht den Einsatz von unbemannten AufklSys interessant.<br />
Vor allem die Vermeidung eigener und ziviler Opfer,<br />
sowie die Reduzierung von Unterstützungspersonal zu Gunsten<br />
anderer Kräfte in den Einsatzkontingenten sprechen für den<br />
Einsatz dieser Systeme.<br />
Das modulare operative AufklSys WOERMS soll dem Truppenführer<br />
ein durchhaltefähiges Einsatzmittel zur abstandfähigen<br />
Informationsgewinnung in allen Phasen der Operationsplanung<br />
und -durchführung, zur echtzeitnahen Zielaufklärung<br />
im urbanen Gelände und zur Wirkungsaufklärung nach dem<br />
Einsatz von Steilfeuer oder Luftkriegsmitteln bieten.<br />
Dabei bildet das AufklSys WOERMS den konzeptionellen<br />
Rahmen für die Entwicklung eines mehrgliedrigen, miniaturisierten<br />
Antriebs- und Bewegungssystems auf Basis<br />
elektrorheologischer (ER-) Flüssigkeiten. Dem Initiator des<br />
<strong>Forschung</strong>sprojektes, das <strong>Wehrwissenschaftliche</strong> Institut<br />
für Werk- und Betriebsstoffe (WiWeB), kommt es in diesem<br />
Zusammenhang besonders auf die Erforschung von Einsatzmöglichkeiten<br />
und Grenzen der ER-Technologie in Mikrohydrauliksystemen-<br />
als Grundlage für die Entwicklung<br />
neuartiger Mikroaktorenkonzepte an.<br />
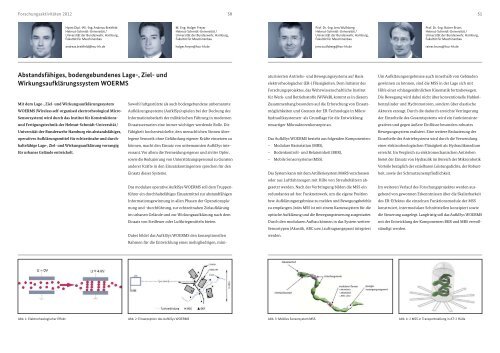
Das AufklSys WOERMS besteht aus folgenden Komponenten:<br />
– Modulare Basisstation (MBS),<br />
– Bodenkontroll- und Relaiseinheit (BKR),<br />
– Mobile Sensorsysteme (MSS).<br />
Das System kann mit dem Artilleriesystem MARS verschossen<br />
oder aus Luftfahrzeugen mit Hilfe von Streubehältern abgesetzt<br />
werden. Nach der Verbringung bilden die MSS ein<br />
redundantes ad-hoc Funknetzwerk, um die eigene Position<br />
bzw. Aufklärungsergebnisse zu melden und Bewegungsbefehle<br />
zu empfangen. Jedes MSS ist mit einem Kamerasystem für die<br />
optische Aufklärung und die Bewegungsteuerung ausgestattet.<br />
Durch den modularen Aufbau können in das System weitere<br />
Sensortypen (Akustik, ABC usw.) auftragsangepasst integriert<br />
werden.<br />
Um Aufklärungsergebnisse auch innerhalb von Gebäuden<br />
gewinnen zu können, sind die MSS in der Lage sich mit<br />
Hilfe einer schlangenähnlichen Kinematik fortzubewegen.<br />
Die Bewegung wird dabei nicht über konventionelle Hubkolbenzylinder<br />
und Hydromotoren, sondern über elastische<br />
Aktoren erzeugt. Durch die dadurch erreichte Verringerung<br />
der Einzelteile des Gesamtsystems wird ein funktionsintegratives<br />
und gegen äußere Einflüsse besonders robustes<br />
Bewegungssystem realisiert. Eine weitere Reduzierung der<br />
Einzelteile des Antriebsystems wird durch die Verwendung<br />
einer elektrorheologischen Flüssigkeit als Hydraulikmedium<br />
erreicht. Im Vergleich zu elektromechanischen Antrieben<br />
bietet der Einsatz von Hydraulik im Bereich der Mikrorobotik<br />
Vorteile bezüglich der erzielbaren Leistungsdichte, der Robustheit,<br />
sowie der Schmutzunempfindlichkeit.<br />
Im weiteren Verlauf des <strong>Forschung</strong>sprojektes werden ausgehend<br />
von gewonnen Erkenntnissen über die Skalierbarkeit<br />
des ER-Effektes die einzelnen Funktionsmodule der MSS<br />
konstruiert, intermodulare Schnittstellen konzipiert sowie<br />
die Steuerung ausgelegt. Langfristig soll das AufklSys WOERMS<br />
mit der Entwicklung der Komponenten BKR und MBS vervollständigt<br />
werden.<br />
Abb. 1: Elektrorheologischer Effekt Abb. 2: Einsatzoption des AufklSys WOERMS Abb. 3: Mobiles Sensorsystem MSS Abb. 4: 2 MSS in Transportstellung in AT-2 Hülle