Mechanics and Tribology of MEMS Materials - prod.sandia.gov ...
Mechanics and Tribology of MEMS Materials - prod.sandia.gov ...
Mechanics and Tribology of MEMS Materials - prod.sandia.gov ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
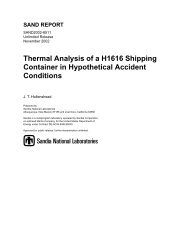
6.2 A Review <strong>of</strong> Analytical Models<br />
It is widely recognized that under the action <strong>of</strong> surface forces the surfaces are drawn<br />
together <strong>and</strong> a finite area <strong>of</strong> contact is established for zero applied load. In JKR model [6.3], the<br />
shape <strong>of</strong> the contact is quite different from that associated with Hertzian deformation <strong>and</strong> shows<br />
a small neck around the contact zone (Fig. 6.2b). If an external load is applied, the contact area<br />
is increased but on reducing the load it decreases reversibly. If the external load is made<br />
negative, the area <strong>of</strong> contact diminishes until an instability occurs at a finite size <strong>of</strong> the contact<br />
circle <strong>and</strong> the surfaces pull apart. The major difference between this (JKR model) <strong>and</strong> the DMT<br />
model is that the later assumes Hertzian deformation is not modified by the surface forces (Fig.<br />
6.2a). The pull-<strong>of</strong>f force from JKR model is comparable with, but smaller than, that given by the<br />
DMT model, Fig. 6.2c, [6.4, 6.5]. Neither <strong>of</strong> the two models predicts the role surface<br />
morphology on adhesion.<br />
Fig. 6.2. Contact between an elastic sphere <strong>and</strong> a rigid flat in the presence <strong>of</strong> surface forces: (a)<br />
the DMT model; (b) the JKR model; (c) the change in radius <strong>of</strong> contact as a function <strong>of</strong><br />
applied load.<br />
The classical work in the field <strong>of</strong> adhesion <strong>of</strong> rough surfaces is that <strong>of</strong> Fuller <strong>and</strong> Tabor<br />
[6.6], who showed experimentally that higher surface roughness could actually give rise to lower<br />
adhesion force. Using the theoretical approach <strong>of</strong> Greenwood <strong>and</strong> Williamson [6.7] for asperity<br />
related issues, <strong>and</strong> the JKR formulas <strong>of</strong> adhesive contact <strong>of</strong> two spheres [6.3], Fuller <strong>and</strong> Tabor<br />
[6.6] arrived at a non-dimensional adhesion parameter, θ, defined as:<br />
Eσ<br />
β<br />
θ =<br />
βW<br />
where E is the effective elastic modulus, σ is the st<strong>and</strong>ard deviation <strong>of</strong> asperity heights from an<br />
average datum plane, β is the radius <strong>of</strong> curvature <strong>of</strong> individual asperity, <strong>and</strong> W is the work <strong>of</strong><br />
adhesion ( W = γ1 + γ2 – γ12, where γ1 <strong>and</strong> γ2 are the surface energies <strong>of</strong> the individual surfaces<br />
<strong>of</strong> the contacting materials, <strong>and</strong> γ12 is the surface energy <strong>of</strong> the interface). Low adhesion occurs<br />
for a high value <strong>of</strong> adhesion parameter, θ, <strong>and</strong> equation (1) shows that this can be accomplished<br />
with: (i) high elastic modulus <strong>of</strong> the materials (or possibly a high modulus coating on a lower<br />
modulus substrate), (ii) a high value <strong>of</strong> σ, i.e., high surface roughness, (iii) a low value <strong>of</strong> work<br />
54<br />
3<br />
2<br />
1<br />
2