

POLITECHNIKA WARSZAWSKA
POLITECHNIKA WARSZAWSKA
POLITECHNIKA WARSZAWSKA

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6. ANN sensorless Field Oriented Conrol of IM<br />
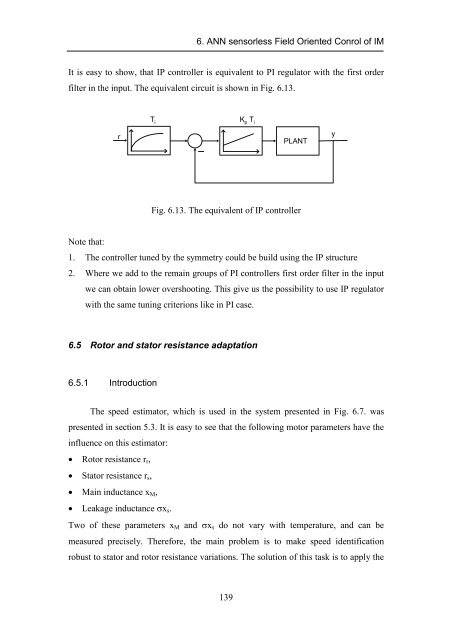
It is easy to show, that IP controller is equivalent to PI regulator with the first order<br />
filter in the input. The equivalent circuit is shown in Fig. 6.13.<br />
r<br />
T i<br />
K p<br />
T i<br />
PLANT<br />
y<br />
Fig. 6.13. The equivalent of IP controller<br />
Note that:<br />
1. The controller tuned by the symmetry could be build using the IP structure<br />
2. Where we add to the remain groups of PI controllers first order filter in the input<br />
we can obtain lower overshooting. This give us the possibility to use IP regulator<br />
with the same tuning criterions like in PI case.<br />
6.5 Rotor and stator resistance adaptation<br />
6.5.1 Introduction<br />
The speed estimator, which is used in the system presented in Fig. 6.7. was<br />
presented in section 5.3. It is easy to see that the following motor parameters have the<br />
influence on this estimator:<br />
• Rotor resistance r r ,<br />
• Stator resistance r s ,<br />
• Main inductance x M ,<br />
• Leakage inductance σx s .<br />
Two of these parameters x M and σx s do not vary with temperature, and can be<br />
measured precisely. Therefore, the main problem is to make speed identification<br />
robust to stator and rotor resistance variations. The solution of this task is to apply the<br />
139













![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
