

POLITECHNIKA WARSZAWSKA
POLITECHNIKA WARSZAWSKA
POLITECHNIKA WARSZAWSKA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4. ANN based Current Controllers (CC)<br />
Based on work [34] (where it has been demonstrated that is possible to perform<br />
current vector control in an arbitrary coordinates), a synchronous controller working<br />
in the stationary coordinates α-β with ac components has been presented [33]. As<br />
shown in Fig.4.8b by the dashed line, the inner loop of the control system (consisting<br />
of two integrators and multipliers) is a variable frequency generator, which always<br />
produces reference voltages uαc , u βc for the PWM modulator, even when in the<br />
steady state the current error signals are zero.<br />
In general, thanks to the use of PWM modulators, the linear controllers make a well<br />
defined harmonic spectrum available, but their dynamic properties are inferior to<br />
those of bang-bang controllers.<br />
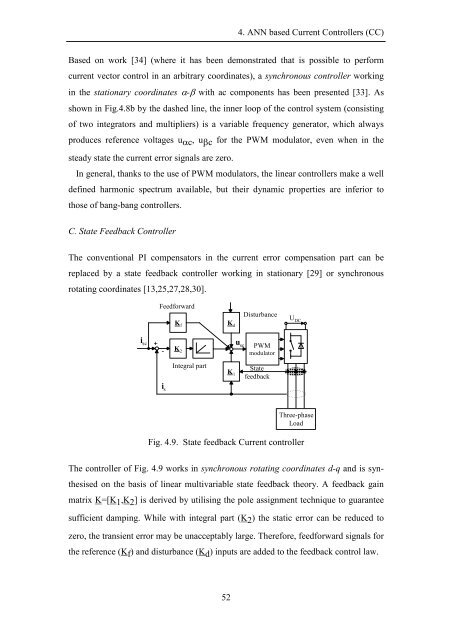
C. State Feedback Controller<br />
The conventional PI compensators in the current error compensation part can be<br />
replaced by a state feedback controller working in stationary [29] or synchronous<br />
rotating coordinates [13,25,27,28,30].<br />
Feedforward<br />
K f<br />
K d<br />
Disturbance<br />
U DC<br />
i sc<br />
+<br />
-<br />
K 2<br />
u sc<br />
PWM<br />
modulator<br />
Integral part<br />
K 1<br />
State<br />
feedback<br />
i s<br />
Three-phase<br />
Load<br />
Fig. 4.9. State feedback Current controller<br />
The controller of Fig. 4.9 works in synchronous rotating coordinates d-q and is synthesised<br />
on the basis of linear multivariable state feedback theory. A feedback gain<br />
matrix K=[K 1 ,K 2 ] is derived by utilising the pole assignment technique to guarantee<br />
sufficient damping. While with integral part (K 2 ) the static error can be reduced to<br />
zero, the transient error may be unacceptably large. Therefore, feedforward signals for<br />
the reference (K f ) and disturbance (K d ) inputs are added to the feedback control law.<br />
52













![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
