

DARPA ULTRALOG Final Report - Industrial and Manufacturing ...
DARPA ULTRALOG Final Report - Industrial and Manufacturing ...
DARPA ULTRALOG Final Report - Industrial and Manufacturing ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Manuscript for IEEE TRANSACTIONS ON PARALLEL AND DISTRIBUTED SYSTEMS 6<br />
<br />
A 1<br />
A 3<br />
N 2<br />
N 1<br />
100<br />
0<br />
<br />
A 2 A 4<br />
N 3<br />
100<br />
0<br />
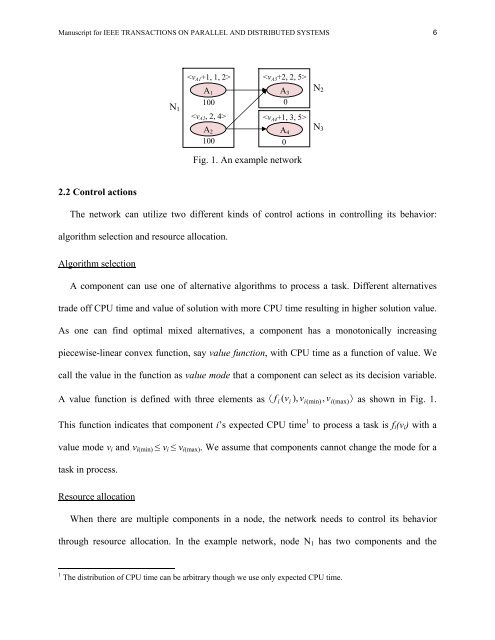
Fig. 1. An example network<br />
2.2 Control actions<br />
The network can utilize two different kinds of control actions in controlling its behavior:<br />
algorithm selection <strong>and</strong> resource allocation.<br />
Algorithm selection<br />
A component can use one of alternative algorithms to process a task. Different alternatives<br />
trade off CPU time <strong>and</strong> value of solution with more CPU time resulting in higher solution value.<br />
As one can find optimal mixed alternatives, a component has a monotonically increasing<br />
piecewise-linear convex function, say value function, with CPU time as a function of value. We<br />
call the value in the function as value mode that a component can select as its decision variable.<br />
A value function is defined with three elements as f v ), v v 〉 as shown in Fig. 1.<br />
〈 i ( i i(min),<br />
i(max)<br />
This function indicates that component i’s expected CPU time 1 to process a task is f i (v i ) with a<br />
value mode v i <strong>and</strong> v i(min) ≤ v i ≤ v i(max) . We assume that components cannot change the mode for a<br />
task in process.<br />
Resource allocation<br />
When there are multiple components in a node, the network needs to control its behavior<br />
through resource allocation. In the example network, node N 1 has two components <strong>and</strong> the<br />
1 The distribution of CPU time can be arbitrary though we use only expected CPU time.














