

DARPA ULTRALOG Final Report - Industrial and Manufacturing ...
DARPA ULTRALOG Final Report - Industrial and Manufacturing ...
DARPA ULTRALOG Final Report - Industrial and Manufacturing ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Manuscript for IEEE Transactions on Automatic Control 20<br />
8. Empirical results<br />
We ran several experiments using discrete-event simulation to validate the designed control<br />
mechanism. Though we use a small network in the experimentation for validation purpose, the<br />
decentralized model, especially, can h<strong>and</strong>le much larger networks.<br />
8.1 Experimental design<br />
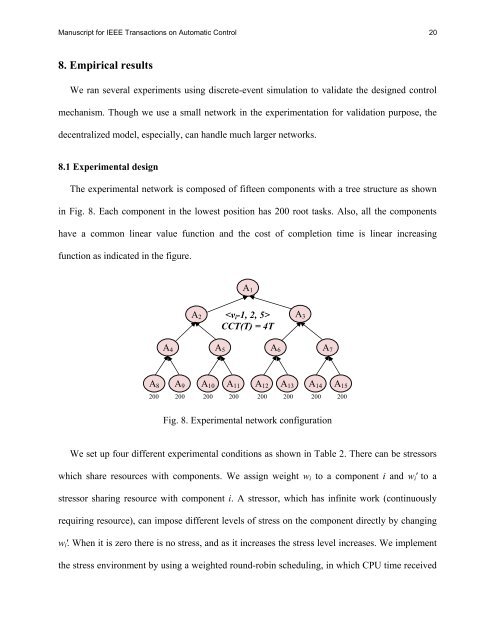
The experimental network is composed of fifteen components with a tree structure as shown<br />
in Fig. 8. Each component in the lowest position has 200 root tasks. Also, all the components<br />
have a common linear value function <strong>and</strong> the cost of completion time is linear increasing<br />
function as indicated in the figure.<br />
A 1<br />
A 2<br />
<br />
CCT(T) = 4T<br />
A 3<br />
A 15<br />
A 4 A 5<br />
A 8 A 9 A 10 A 11<br />
A 6 A 7<br />
A 12 A 13 A 14<br />
200 200 200 200 200 200 200 200<br />
Fig. 8. Experimental network configuration<br />
We set up four different experimental conditions as shown in Table 2. There can be stressors<br />
which share resources with components. We assign weight w i to a component i <strong>and</strong> w i ′ to a<br />
stressor sharing resource with component i. A stressor, which has infinite work (continuously<br />
requiring resource), can impose different levels of stress on the component directly by changing<br />
w i ′. When it is zero there is no stress, <strong>and</strong> as it increases the stress level increases. We implement<br />
the stress environment by using a weighted round-robin scheduling, in which CPU time received














