3-Phase BLDC Motor Sensorless Control Using MC56F8013
3-Phase BLDC Motor Sensorless Control Using MC56F8013
3-Phase BLDC Motor Sensorless Control Using MC56F8013
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
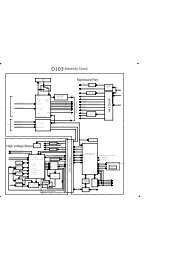
Tuning7.5.4.4 OMEGA_MIN_SYSUIf the adjusted speed or actual speed of motor is below this value, the motor is stopped.7.5.4.5 CURR_LIMIT_DESIRED_AThe DC-bus current will be limited above this value. If the DC-bus current is greater than this value, thePWM duty cycle will be limited until the DC-bus current drops again below this value.The current limitation is active the both alignment and running commutation states. An alarm signal is alsogenerated, if current limiting is acting on the output.This parameter can also be set from the DC-bus current gauge on the FreeMaster page.7.5.5 <strong>Control</strong>ler Parametersthe <strong>BLDC</strong> sensorless application contains three PI controllers.• Speed controller: to keep the motor speed at the desired value; active only during run mode.• Alignment current controller: to keep the alignment current at the desired value; active only duringalignment.• Current limitation controller: to keep the DC-bus current below a desired value; active duringalignment and running.All three PI controllers have same structure. As with all PI controllers, their proportional gain and integralgain can be adjusted.Alignment CurrentSetpoint+Alignment CurrentPI <strong>Control</strong>ler(active if commutationstate = ALIGNMENT)UDesired-Actual DCBus Currentto PWMActual DCBus Current+Current LimitationPI <strong>Control</strong>ler-Limit Current SetpointSpeed Setpoint+-Speed PI <strong>Control</strong>ler(active if commutationstate = RUNNING)UDesiredActual SpeedFigure 7-8. PI <strong>Control</strong>ler StructureIn this application, all PI controllers proportional and integral constants are set experimentally.3-<strong>Phase</strong> <strong>BLDC</strong> <strong>Motor</strong> <strong>Sensorless</strong> <strong>Control</strong> using <strong>MC56F8013</strong>, Rev. 086 Freescale Semiconductor

![P-CAD EDA - [Sheet1]](https://img.yumpu.com/49470492/1/190x115/p-cad-eda-sheet1.jpg?quality=85)