

EF
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ U Ðодели Ñ Ð³Ð°Ð±Ð°ÑиÑами Ð¾Ñ 1 до 9
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ U Ðодели Ñ Ð³Ð°Ð±Ð°ÑиÑами Ð¾Ñ 1 до 9

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Сведения Механическ<br />
об изделии установка<br />
Электрическ Приступаем<br />
установка к работе<br />
Основные<br />
параметры<br />
Работа<br />
двигателя<br />
Техника безопасности<br />
Оптимизация<br />
Работа со<br />
Smartcard<br />
Встроенный<br />
ПЛК<br />
Дополнит.<br />
параметры<br />
Техническ.<br />
данные<br />
Диагностика Сведения о<br />
списке UL<br />
Сервосистема<br />
В серво режиме имеется три теста автонастройки: короткий тест малой<br />
скорости, нормальный тест малой скорости и тест измерений момента<br />
инерции. По мере возможности следует выполнять нормальный тест<br />
малой скорости, поскольку привод измеряет сопротивление статора и<br />
индуктивность двигателя и по этим данным рассчитывает<br />
коэффициенты усиления для контура тока. Тест измерения момента<br />
инерции следует выполнять отдельно от автонастройки с короткой<br />
малой скоростью и от автонастройки с нормальной малой скоростью.<br />
• В коротком тесте малой скорости двигатель вращается на 2<br />
электрических оборота (то есть до 2 механических оборотов) в<br />
направлении вперед и при этом измеряется фазовый угол энкодера.<br />
Для этого теста двигатель должен работать без нагрузки.<br />
• В нормальном тесте малой скорости двигатель вращается на 2<br />
электрических оборота (то есть до 2 механических оборотов) в<br />
направлении вперед. Тест измеряет фазовый угол энкодера и<br />
обновляет другие параметры, включая коэф. усиления контура тока.<br />
Для этого теста двигатель должен работать без нагрузки.<br />
• Тест измерения инерции позволяет определить суммарный момент<br />
инерции нагрузки и двигателя. Он используется для настройки<br />
коэффициентов усиления в контуре управления скоростью и<br />
обеспечивает нужный для разгона динамический момент. Во время<br />
теста измерения инерции скорость двигателя несколько раз<br />
изменяется от 1 / 3 до 2 / 3 номинальной скорости в направлении<br />
"вперед". К двигателю может быть подключена нагрузка с<br />
постоянным моментом нагрузки, при этом тест все равно будет<br />
давать точные результаты измерений. Однако использование<br />
нелинейных нагрузок и зависящих от скорости нагрузок приводит к<br />
появлению ошибок измерений.<br />
• Тест с неподвижным двигателем измеряет только сопротивление и<br />
индуктивность двигателя и обновляет параметры усиления контура<br />
тока. Это тест не измеряет фазовый угол энкодера, поэтому его<br />
нужно выполнять вместе с коротким тестом малой скорости или с<br />
тестом минимального движения.<br />
• Тест минимального движения поворачивает двигатель на малый<br />
угол для измерения фазового угла энкодера. Этот тест нельзя<br />
использовать для двигателя с нагрузкой.<br />
Для выполнения автонастройки задайте в 0.40 1 для короткого теста<br />
малой скорости, 2 для нормального теста малой скорости или 3 для<br />
теста измерения инерции, 4 для неподвижного теста или 5 для теста<br />
минимального движения, на привод надо подать сигнал разрешения (на<br />
клемму 31) и сигнал работы (на клемму 26 или 27).<br />
После выполнения процедуры автонастройки необходимо отключить<br />
сигнал работы или сигнал разрешения, и только после этого привод<br />
может работать от нужного заданного значения.<br />
Настройка Pr 0.40 в значение 6 заставляет привод вычислить<br />
коэффициенты усиления по измеренным значениям сопротивления и<br />
индуктивности двигателя. При этом тесте привод не подает на<br />
двигатель никакого напряжения. Сразу после завершения вычислений<br />
(примерно через 100 мсек) привод сбрасывает Pr 0.40 назад в 0.<br />
Более подробные сведения смотрите в разделе Pr 0.40 {5.12}<br />
Автонастройка на стр. 146.<br />
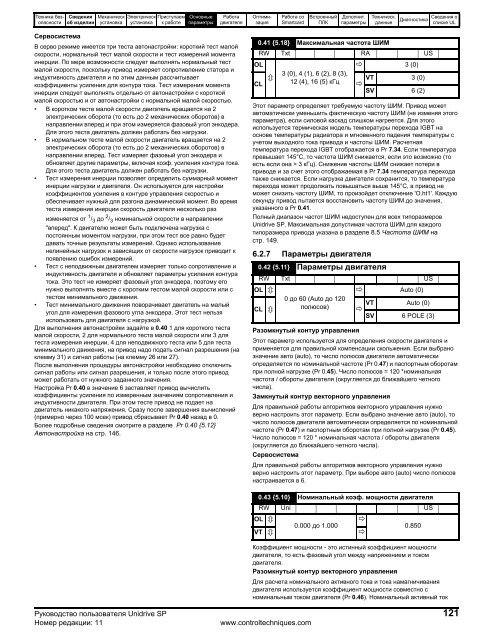
0.41 {5.18} Максимальная частота ШИМ<br />
RW Txt RA US<br />
OL<br />
3 (0)<br />
3 (0), 4 (1), 6 (2), 8 (3),<br />
VT 3 (0)<br />
CL 12 (4), 16 (5) кГц <br />
SV 6 (2)<br />
Этот параметр определяет требуемую частоту ШИМ. Привод может<br />
автоматически уменьшить фактическую частоту ШИМ (не изменяя этого<br />
параметра), если силовой каскад слишком нагреется. Для этого<br />
используется термическая модель температуры перехода IGBT на<br />
основе температуры радиатора и мгновенного падения температуры с<br />
учетом выходного тока привода и частоты ШИМ. Расчетная<br />
температура перехода IGBT отображается в Pr 7.34. Если температура<br />
превышает 145°C, то частота ШИМ снижается, если это возможно (то<br />
есть если она > 3 кГц). Снижение частоты ШИМ снижает потери в<br />
приводе и за счет этого отображаемая в Pr 7.34 температура перехода<br />
также снижается. Если нагрузка двигателя сохранится, то температура<br />
перехода может продолжать повышаться выше 145°C, а привод не<br />
может снизить частоту ШИМ, то произойдет отключение 'O.ht1'. Каждую<br />
секунду привод пытается восстановить частоту ШИМ до значения,<br />
указанного в Pr 0.41.<br />
Полный диапазон частот ШИМ недоступен для всех типоразмеров<br />
Unidrive SP. Максимальная допустимая частота ШИМ для каждого<br />
типоразмера привода указана в разделе 8.5 Частота ШИМ на<br />
стр. 149.<br />
6.2.7 Параметры двигателя<br />
0.42 {5.11} Параметры двигателя<br />
RW Txt US<br />
OL <br />
Auto (0)<br />
0 до 60 (Auto до 120<br />
VT Auto (0)<br />
CL полюсов) <br />
SV 6 POLE (3)<br />
Разомкнутый контур управления<br />
Этот параметр используется для определения скорости двигателя и<br />
применяется для правильной компенсации скольжения. Если выбрано<br />
значение авто (auto), то число полюсов двигателя автоматически<br />
определяется по номинальной частоте (Pr 0.47) и паспортным оборотам<br />
при полной нагрузке (Pr 0.45). Число полюсов = 120 *номинальная<br />
частота / обороты двигателя (округляется до ближайшего четного<br />
числа).<br />
Замкнутый контур векторного управления<br />
Для правильной работы алгоритмов векторного управления нужно<br />
верно настроить этот параметр. Если выбрано значение авто (auto), то<br />
число полюсов двигателя автоматически определяется по номинальной<br />
частоте (Pr 0.47) и паспортным оборотам при полной нагрузке (Pr 0.45).<br />
Число полюсов = 120 * номинальная частота / обороты двигателя<br />
(округляется до ближайшего четного числа).<br />
Сервосистема<br />
Для правильной работы алгоритмов векторного управления нужно<br />
верно настроить этот параметр. При выборе авто (auto) число полюсов<br />
настраивается в 6.<br />
0.43 {5.10} Номинальный коэф. мощности двигателя<br />
RW Uni US<br />
OL <br />
<br />
0.000 до 1.000<br />
0.850<br />
VT <br />
<br />
Коэффициент мощности - это истинный коэффициент мощности<br />
двигателя, то есть фазовый угол между напряжением и током<br />
двигателя.<br />
Разомкнутый контур векторного управления<br />
Для расчета номинального активного тока и тока намагничивания<br />
двигателя используется коэффициент мощности совместно с<br />
номинальным током двигателя (Pr 0.46). Номинальный активный ток<br />
Руководство пользователя Unidrive SP 121<br />
Номер редакции: 11<br />
www.controltechniques.com













