

EF
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ U Ðодели Ñ Ð³Ð°Ð±Ð°ÑиÑами Ð¾Ñ 1 до 9
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ U Ðодели Ñ Ð³Ð°Ð±Ð°ÑиÑами Ð¾Ñ 1 до 9

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Техника безопасности<br />
изделии<br />
Сведения об Механическ<br />
установка<br />
Электрическ Приступаем<br />
установка к работе<br />
Основные<br />
параметры<br />
Работа<br />
двигателя<br />
Оптимизация<br />
Работа со<br />
Smartcard<br />
Встроенный<br />
ПЛК<br />
Дополнит.<br />
параметры<br />
Техническ.<br />
данные<br />
Диагностика Сведения о<br />
списке UL<br />
8 Оптимизация<br />
Эта глава знакомит пользователя с методами оптимизации настройки изделия и повышения качества его работы. Эта задача упрощается<br />
при использовании функции автонастройки привода.<br />
8.1 Параметры карты двигателя<br />
8.1.1 Управление двигателем с разомкнутым контуром<br />
Pr 0.46 {5.07} Номинальный ток двигателя<br />
Определяет максимальный непрерывный ток двигателя<br />
Параметр номинального тока двигателя нужно настроить на максимальный непрерывный ток двигателя (смотрите раздел<br />
8.2 Паспортное значение максимального тока двигателя на стр. 148, где описана настройка этого параметра в значение выше, чем<br />
максимальный номинальный ток тяжелого режима Heavy Duty). Номинальный ток двигателя используется для следующих функций:<br />
• Пределы тока (смотрите раздел 8.3 Пределы тока на стр. 148, для дополнительной информации)<br />
• Защита двигателя от перегрева (смотрите раздел 8.4 Тепловая защита двигателя на стр. 148, для дополнительной информации)<br />
• Управление напряжением в векторном режиме (смотрите Режим напряжения Pr 0.07, далее в этой Таблице)<br />
• Компенсация скольжения (смотрите Компенсация скольжения Pr 5.27, далее в этой Таблице)<br />
• Динамическое управление V/F<br />
Pr 0.44 {5.09} Номинальное напряжение двигателя<br />
Определяет напряжение, подаваемое на двигатель при<br />
номинальной частоте<br />
Pr 0.47 {5.06} Номинальная частота двигателя<br />
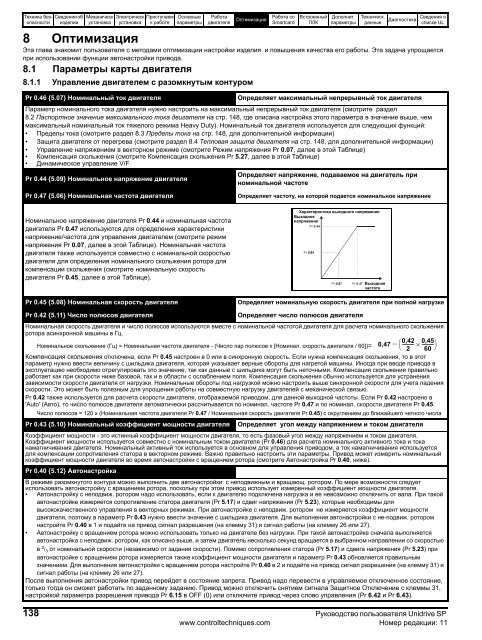
Номинальное напряжение двигателя Pr 0.44 и номинальная частота<br />
двигателя Pr 0.47 используются для определения характеристики<br />
напряжение/частота для управления двигателем (смотрите режим<br />
напряжения Pr 0.07, далее в этой Таблице). Номинальная частота<br />
двигателя также используется совместно с номинальной скоростью<br />
двигателя для определения номинального скольжения ротора для<br />
компенсации скольжения (смотрите номинальную скорость<br />
двигателя Pr 0.45, далее в этой Таблице).<br />
Pr 0.45 {5.08} Номинальная скорость двигателя<br />
Определяет частоту, на которой подается номинальное напряжение<br />
Характеристика выходного напряжения<br />
Выходное<br />
напряжение<br />
Pr 0.44 / 2<br />
Pr 0.44<br />
Pr 0.47 / 2 Pr 0.47 Выходная<br />
частота<br />
Определяет номинальную скорость двигателя при полной нагрузке<br />
Pr 0.42 {5.11} Число полюсов двигателя<br />
Определяет число полюсов двигателя<br />
Номинальная скорость двигателя и число полюсов используются вместе с номинальной частотой двигателя для расчета номинального скольжения<br />
ротора асинхронной машины в Гц.<br />
Номинальное скольжение (Гц) = Номинальная частота двигателя - (Число пар полюсов x [Номинал. скорость двигателя / 60])= 0,47 – 0,42 0,45<br />
---------- × ----------<br />
⎝<br />
⎛ 2 60 ⎠<br />
⎞<br />
Компенсация скольжения отключена, если Pr 0.45 настроен в 0 или в синхронную скорость. Если нужна компенсация скольжения, то в этот<br />
параметр нужно ввести величину с шильдика двигателя, которая указывает верные обороты для нагретой машины. Иногда при вводе привода в<br />
эксплуатацию необходимо отрегулировать это значение, так как данные с шильдика могут быть неточными. Компенсация скольжения правильно<br />
работает как при скорости ниже базовой, так и в области с ослаблением поля. Компенсация скольжения обычно используется для устранения<br />
зависимости скорости двигателя от нагрузки. Номинальные обороты под нагрузкой можно настроить выше синхронной скорости для учета падения<br />
скорости. Это может быть полезным для упрощения работы на совместную нагрузку двигателей с механической связью.<br />
Pr 0.42 также используется для расчета скорости двигателя, отображаемой приводом, для данной выходной частоты. Если Pr 0.42 настроено в<br />
'Auto' (Авто), то число полюсов двигателя автоматически рассчитывается по номинал. частоте Pr 0.47 и по номинал. скорости двигателя Pr 0.45.<br />
Число полюсов = 120 x (Номинальная частота двигателя Pr 0.47 / Номинальная скорость двигателя Pr 0.45) с округлением до ближайшего четного числа<br />
Pr 0.43 {5.10} Номинальный коэффициент мощности двигателя<br />
Определяет угол между напряжением и током двигателя<br />
Коэффициент мощности - это истинный коэффициент мощности двигателя, то есть фазовый угол между напряжением и током двигателя.<br />
Коэффициент мощности используется совместно с номинальным током двигателя (Pr 0.46) для расчета номинального активного тока и тока<br />
намагничивания двигателя. Номинальный активный ток используется в основном для управления приводом, а ток намагничивания используется<br />
для компенсации сопротивления статора в векторном режиме. Важно правильно настроить эти параметры. Привод может измерить номинальный<br />
коэффициент мощности двигателя во время автонастройки с вращением ротора (смотрите Автонастройка Pr 0.40, ниже).<br />
Pr 0.40 {5.12} Автонастройка<br />
В режиме разомкнутого контура можно выполнить две автонастройки: с неподвижным и вращающ. ротором. По мере возможности следует<br />
использовать автонастройку с вращением ротора, поскольку при этом привод использует измеренный коэффициент мощности двигателя.<br />
• Автонастройку с неподвиж. ротором надо использовать, если к двигателю подключена нагрузка и ее невозможно отключить от вала. При такой<br />
автонастройке измеряется сопротивление статора двигателя (Pr 5.17) и сдвиг напряжения (Pr 5.23), которые необходимы для<br />
высококачественного управления в векторных режимах. При автонастройке с неподвиж. ротором не измеряется коэффициент мощности<br />
двигателя, поэтому в параметр Pr 0.43 нужно ввести значение с шильдика двигателя. Для выполнения автонастройки с не-подвиж. ротором<br />
настройте Pr 0.40 в 1 и подайте на привод сигнал разрешения (на клемму 31) и сигнал работы (на клемму 26 или 27).<br />
• Автонастройку с вращением ротора можно использовать только на двигателе без нагрузки. При такой автонастройке сначала выполняется<br />
автонастройка с неподвиж. ротором, как описано выше, и затем двигатель несколько секунд вращается в выбранном направлении со скоростью<br />
в 2 / 3 от номинальной скорости (независимо от задания скорости). Помимо сопротивления статора (Pr 5.17) и сдвига напряжения (Pr 5.23) при<br />
автонастройке с вращением ротора измеряется также коэффициент мощности двигателя и параметр Pr 0.43 обновляется правильным<br />
значением. Для выполнения автонастройки с вращением ротора настройте Pr 0.40 в 2 и подайте на привод сигнал разрешения (на клемму 31) и<br />
сигнал работы (на клемму 26 или 27).<br />
После выполнения автонастройки привод перейдет в состояние запрета. Привод надо перевести в управляемое отключенное состояние,<br />
только тогда он сможет работать по заданному заданию. Привод можно отключить снятием сигнала Защитное Отключение с клеммы 31,<br />
настройкой параметра разрешения привода Pr 6.15 в OFF (0) или отключите привод через слово управления (Pr 6.42 и Pr 6.43).<br />
138 Руководство пользователя Unidrive SP<br />
www.controltechniques.com Номер редакции: 11













