

EF
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ U Ðодели Ñ Ð³Ð°Ð±Ð°ÑиÑами Ð¾Ñ 1 до 9
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ U Ðодели Ñ Ð³Ð°Ð±Ð°ÑиÑами Ð¾Ñ 1 до 9

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Техника безопасности<br />
Сведения Механическ<br />
об изделии установка<br />
Электрическ Приступаем<br />
установка к работе<br />
Основные<br />
параметры<br />
Работа<br />
двигателя<br />
Оптимизация<br />
Работа со<br />
Smartcard<br />
Встроенный<br />
ПЛК<br />
Дополнит.<br />
параметры<br />
Техническ.<br />
данные<br />
Диагностика Сведения о<br />
списке UL<br />
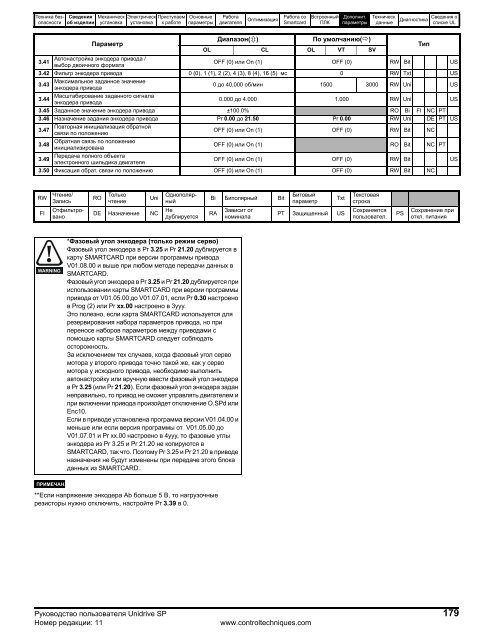
Параметр<br />
Диапазон()<br />
По умолчанию()<br />
OL CL OL VT SV<br />
3.41<br />
Автонастройка энкодера привода /<br />
выбор двоичного формата<br />
OFF (0) или On (1) OFF (0) RW Bit US<br />
3.42 Фильтр энкодера привода 0 (0), 1 (1), 2 (2), 4 (3), 8 (4), 16 (5) мс 0 RW Txt US<br />
3.43<br />
Максимальное заданное значение<br />
энкодера привода<br />
0 до 40,000 об/мин 1500 3000 RW Uni US<br />
3.44<br />
Масштабирование заданного сигнала<br />
энкодера привода<br />
0.000 до 4.000 1.000 RW Uni US<br />
3.45 Заданное значение энкодера привода ±100.0% RO Bi FI NC PT<br />
3.46 Назначение задания энкодера привода Pr 0.00 до 21.50 Pr 0.00 RW Uni DE PT US<br />
3.47<br />
Повторная инициализация обратной<br />
связи по положению<br />
OFF (0) или On (1) OFF (0) RW Bit NC<br />
3.48<br />
Обратная связь по положению<br />
инициализирована<br />
OFF (0) или On (1) RO Bit NC PT<br />
3.49<br />
Передача полного объекта<br />
электронного шильдика двигателя<br />
OFF (0) или On (1) OFF (0) RW Bit US<br />
3.50 Фиксация обрат. связи по положению OFF (0) или On (1) OFF (0) RW Bit NC<br />
Тип<br />
RW<br />
Чтение/<br />
Запись<br />
RO<br />
Только<br />
чтение<br />
Uni<br />
Однополярный<br />
Bi Биполярный Bit<br />
Битовый<br />
параметр<br />
Txt<br />
Текстовая<br />
строка<br />
FI<br />
Отфильтровано<br />
DE Назначение NC Не<br />
дублируется<br />
RA<br />
Зависит от<br />
номинала<br />
PT Защищенный US<br />
Сохраняется<br />
пользовател.<br />
PS<br />
Сохранение при<br />
откл. питания<br />
WARNING<br />
*Фазовый угол энкодера (только режим серво)<br />
Фазовый угол энкодера в Pr 3.25 и Pr 21.20 дублируется в<br />
карту SMARTCARD при версии программы привода<br />
V01.08.00 и выше при любом методе передачи данных в<br />
SMARTCARD.<br />
Фазовый угол энкодера в Pr 3.25 и Pr 21.20 дублируется при<br />
использовании карты SMARTCARD при версии программы<br />
привода от V01.05.00 до V01.07.01, если Pr 0.30 настроено<br />
в Prog (2) или Pr xx.00 настроено в 3yyy.<br />
Это полезно, если карта SMARTCARD используется для<br />
резервирования набора параметров привода, но при<br />
переносе наборов параметров между приводами с<br />
помощью карты SMARTCARD следует соблюдать<br />
осторожность.<br />
За исключением тех случаев, когда фазовый угол серво<br />
мотора у второго привода точно такой же, как у серво<br />
мотора у исходного привода, необходимо выполнить<br />
автонастройку или вручную ввести фазовый угол энкодера<br />
в Pr 3.25 (или Pr 21.20). Если фазовый угол энкодера задан<br />
неправильно, то привод не сможет управлять двигателем и<br />
при включении привода произойдет отключение O.SPd или<br />
Enc10.<br />
Если в приводе установлена программа версии V01.04.00 и<br />
меньше или если версия программы от V01.05.00 до<br />
V01.07.01 и Pr xx.00 настроено в 4yyy, то фазовые углы<br />
энкодера из Pr 3.25 и Pr 21.20 не копируются в<br />
SMARTCARD, так что. Поэтому Pr 3.25 и Pr 21.20 в приводе<br />
назначения не будут изменены при передаче этого блока<br />
данных из SMARTCARD..<br />
ПРИМЕЧАН.<br />
**Если напряжение энкодера Ab больше 5 В, то нагрузочные<br />
резисторы нужно отключить, настройте Pr 3.39 в 0.<br />
Руководство пользователя Unidrive SP 179<br />
Номер редакции: 11<br />
www.controltechniques.com













