

EF
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ U Ðодели Ñ Ð³Ð°Ð±Ð°ÑиÑами Ð¾Ñ 1 до 9
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ U Ðодели Ñ Ð³Ð°Ð±Ð°ÑиÑами Ð¾Ñ 1 до 9

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Техника безопасности<br />
Сведения Механическ<br />
об изделии установка<br />
Электрическ Приступаем<br />
установка к работе<br />
Основные<br />
параметры<br />
Работа<br />
двигателя<br />
Оптимизация<br />
Работа со<br />
Smartcard<br />
Встроенный<br />
ПЛК<br />
Дополнит.<br />
параметры<br />
Техническ.<br />
данные<br />
Диагностика Сведения о<br />
списке UL<br />
Например, если привод работает на постоянной частоте и<br />
испытывает перегрузку, то система предельного тока будет снижать<br />
выходную частоту для уменьшения перегрузки. Одновременно<br />
рампа будет стремиться увеличить частоту назад до требуемого<br />
уровня задания. Если интегральный коэф. усиления слишком велик,<br />
то первые признаки нестабильности возникнут вблизи точки, в<br />
которой поле начинает ослабевать. Эти осцилляции и выбросы<br />
можно уменьшить увеличением коэффиц-та пропорционального<br />
усиления. Имеется специальная подсистема для предотвращения<br />
ошибки из-за противоположного действия рампы и предела тока.<br />
Это может привести к снижению фактического уровня, когда предел<br />
тока становится активным, на 12.5%. Но при этом ток все же может<br />
увеличиваться до предела тока, заданного пользователем. Однако в<br />
зависимости от величины рампы флаг предельного тока (Pr 10.09)<br />
может активироваться при токе даже на 12.5% ниже предела тока<br />
Управление моментом<br />
Вновь регулятор нормально работает только с интегральным<br />
звеном, особенно ниже точки, где начинается ослабление поля.<br />
Первые признаки нестабильности будут появляться вблизи базовой<br />
скорости, и их можно снизить увеличением коэффициента<br />
пропорционального усиления. В режиме управления моментом<br />
регулятор может быть менее стабильным, чем при ограничении<br />
тока. Это происходит из-за того, что нагрузка стабилизирует<br />
регулятор, а при управлении моментом привод может работать при<br />
небольшой нагрузке. В режиме предельного тока привод часто<br />
работает с большой нагрузкой, если только пределы тока не<br />
выбраны слишком малыми.<br />
Отказ питания и стандартная управляемая рампа:<br />
Регулятор шины звена постоянного тока активируется, если<br />
включено обнаружение отказа питания и на приводе нет питания<br />
или используется управляемая стандартная рампа и машина<br />
рекуперирует энергию. Регулятор шины звена питания пытается<br />
поддержать неизменный уровень напряжения на шине, управляя<br />
для этого силой тока через инвертор привода в конденсаторы шины.<br />
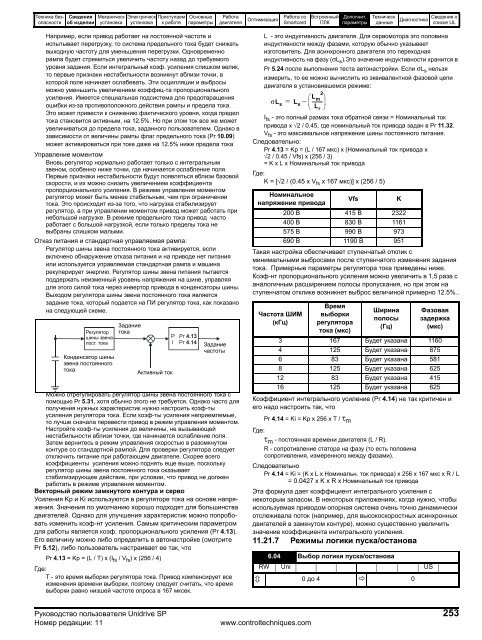
Выходом регулятора шины звена постоянного тока является<br />
задание тока, который подается на ПИ регулятор тока, как показано<br />
на следующей схеме.<br />
Регулятор<br />
шины звена<br />
пост. тока<br />
Конденсатор шины<br />
звена постоянного<br />
тока<br />
Задание<br />
тока<br />
Активный ток<br />
Можно отрегулировать регулятор шины звена постоянного тока с<br />
помощью Pr 5.31, хотя обычно этого не требуется. Однако часто для<br />
получения нужных характеристик нужно настроить коэф-ты<br />
усиления регулятора тока. Если коэф-ты усиления неприемлемые,<br />
то лучше сначала перевести привод в режим управления моментом.<br />
Настройте коэф-ты усиления до величины, не вызывающей<br />
нестабильности вблизи точки, где начинается ослабление поля.<br />
Затем вернитесь в режим управления скоростью в разомкнутом<br />
контуре со стандартной рампой. Для проверки регулятора следует<br />
отключить питание при работающем двигателе. Скорее всего<br />
коэффициенты усиления можно поднять еще выше, поскольку<br />
регулятор шины звена постоянного тока оказывает<br />
стабилизирующее действие, при условии, что привод не должен<br />
работать в режиме управления моментом.<br />
Векторный режим замкнутого контура и серво<br />
Усиления Kp и Ki используются в регуляторе тока на основе напряжения.<br />
Значения по умолчанию хорошо подходят для большинства<br />
двигателей. Однако для улучшения характеристик можно попробовать<br />
изменить коэф-нт усиления. Самым критическим параметром<br />
для работы является коэф. пропорционального усиления (Pr 4.13).<br />
Его величину можно либо определить в автонастройке (смотрите<br />
Pr 5.12), либо пользователь настраивает ее так, что<br />
Pr 4.13 = Kp = (L / T) x (I fs / V fs ) x (256 / 4)<br />
P Pr 4.13<br />
I Pr 4.14<br />
Задание<br />
частоты<br />
Где:<br />
T - это время выборки регулятора тока. Привод компенсирует все<br />
изменения времени выборки, поэтому следует считать, что время<br />
выборки равно низшей частоте опроса в 167 мксек.<br />
L - это индуктивность двигателя. Для сервомотора это половина<br />
индуктивности между фазами, которую обычно указывает<br />
изготовитель. Для асинхронного двигателя это переходная<br />
индуктивность на фазу (σL s ).Это значение индуктивности хранится в<br />
Pr 5.24 после выполнения теста автонастройки. Если σL s нельзя<br />
измерить, то ее можно вычислить из эквивалентной фазовой цепи<br />
двигателя в установившемся режиме:<br />
2<br />
⎛L m ⎞<br />
σL s = L s – ⎜---------<br />
⎟<br />
⎝ L r ⎠<br />
I fs - это полный размах тока обратной связи = Номинальный ток<br />
привода x √2 / 0.45, где номинальный ток привода задан в Pr 11.32.<br />
V fs - это максимальное напряжение шины постоянного питания.<br />
Следовательно:<br />
Pr 4.13 = Kp = (L / 167 мкс) x (Номинальный ток привода x<br />
√2 / 0.45 / Vfs) x (256 / 3)<br />
= K x L x Номинальный ток привода<br />
Где:<br />
K = [√2 / (0.45 x V fs x 167 мкс)] x (256 / 5)<br />
Номинальное<br />
напряжение привода<br />
Vfs<br />
K<br />
200 В 415 В 2322<br />
400 В 830 В 1161<br />
575 В 990 В 973<br />
690 В 1190 В 951<br />
Такая настройка обеспечивает ступенчатый отклик с<br />
минимальными выбросами после ступенчатого изменения задания<br />
тока. Примерные параметры регулятора тока приведены ниже.<br />
Коэф-нт пропорционального усиления можно увеличить в 1,5 раза с<br />
аналогичным расширением полосы пропускания, но при этом на<br />
ступенчатом отклике возникнет выброс величиной примерно 12.5%..<br />
Частота ШИМ<br />
(кГц)<br />
Время<br />
выборки<br />
регулятора<br />
тока (мкс)<br />
Ширина<br />
полосы<br />
(Гц)<br />
Коэффициент интегрального усиление (Pr 4.14) не так критичен и<br />
его надо настроить так, что<br />
Pr 4.14 = Ki = Kp x 256 x T / τ m<br />
Где:<br />
τ m - постоянная времени двигателя (L / R).<br />
R - сопротивление статора на фазу (то есть половина<br />
сопротивления, измеренного между фазами).<br />
Фазовая<br />
задержка<br />
(мкс)<br />
3 167 Будет указана 1160<br />
4 125 Будет указана 875<br />
6 83 Будет указана 581<br />
8 125 Будет указана 625<br />
12 83 Будет указана 415<br />
16 125 Будет указана 625<br />
Следовательно<br />
Pr 4.14 = Ki = (K x L x Номинальн. ток привода) x 256 x 167 мкс x R / L<br />
= 0.0427 x K x R x Номинальный ток привода<br />
Эта формула дает коэффициент интегрального усиления с<br />
некоторым запасом. В некоторых приложениях, когда нужно, чтобы<br />
используемая приводом опорная система очень точно динамически<br />
отслеживала поток (например, для высокоскоростных асинхронных<br />
двигателей в замкнутом контуре), можно существенно увеличить<br />
значение коэффициента интегрального усиления.<br />
11.21.7 Режимы логики пуска/останова<br />
6.04 Выбор логики пуска/останова<br />
RW Uni US<br />
0 до 4 0<br />
Руководство пользователя Unidrive SP 253<br />
Номер редакции: 11<br />
www.controltechniques.com













