

A.R.Drone Developer Guide - Abstract
A.R.Drone Developer Guide - Abstract
A.R.Drone Developer Guide - Abstract

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
14<br />
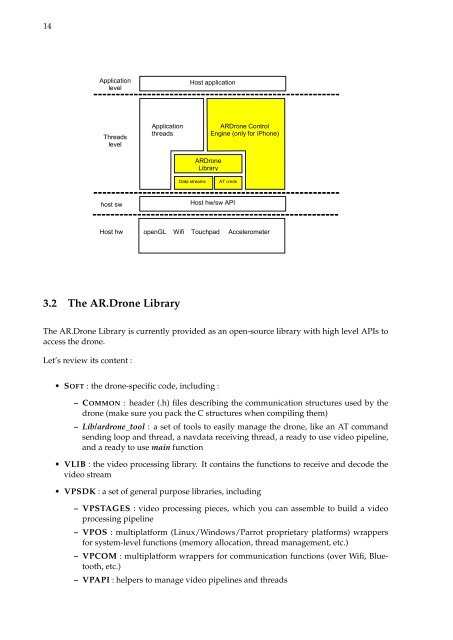
Application<br />
level<br />
Threads<br />
level<br />
host sw<br />
Host hw<br />
Application<br />
threads<br />
3.2 The AR.<strong>Drone</strong> Library<br />
Host application<br />
AR<strong>Drone</strong><br />
Library<br />
Data streams AT cmds<br />
AR<strong>Drone</strong> Control<br />
Engine (only for iPhone)<br />
Host hw/sw API<br />
openGL Wifi Touchpad Accelerometer<br />
The AR.<strong>Drone</strong> Library is currently provided as an open-source library with high level APIs to<br />
access the drone.<br />
Let’s review its content :<br />
• SOFT : the drone-specific code, including :<br />
– COMMON : header (.h) files describing the communication structures used by the<br />
drone (make sure you pack the C structures when compiling them)<br />
– Lib/ardrone_tool : a set of tools to easily manage the drone, like an AT command<br />
sending loop and thread, a navdata receiving thread, a ready to use video pipeline,<br />
and a ready to use main function<br />
• VLIB : the video processing library. It contains the functions to receive and decode the<br />
video stream<br />
• VPSDK : a set of general purpose libraries, including<br />
– VPSTAGES : video processing pieces, which you can assemble to build a video<br />
processing pipeline<br />
– VPOS : multiplatform (Linux/Windows/Parrot proprietary platforms) wrappers<br />
for system-level functions (memory allocation, thread management, etc.)<br />
– VPCOM : multiplatform wrappers for communication functions (over Wifi, Bluetooth,<br />
etc.)<br />
– VPAPI : helpers to manage video pipelines and threads