

Underwater Robots - Gianluca Antonelli.pdf
Underwater Robots - Gianluca Antonelli.pdf
Underwater Robots - Gianluca Antonelli.pdf

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
7.9 Virtual Decomposition Based Control 189<br />
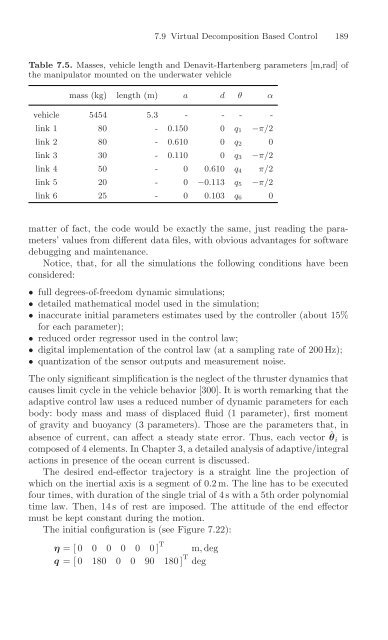
Table 7.5. Masses, vehicle length and Denavit-Hartenberg parameters [m,rad] of<br />
the manipulator mounted on the underwater vehicle<br />
mass (kg) length (m) a d θ α<br />
vehicle 5454 5.3 - - - -<br />
link 1 80 - 0 . 150 0 q 1 − π/2<br />
link 2 80 - 0 . 610 0 q 2 0<br />
link 3 30 - 0 . 110 0 q 3 − π/2<br />
link 4 50 - 0 0. 610 q 4 π/2<br />
link 5 20 - 0 − 0 . 113 q 5 − π/2<br />
link 6 25 - 0 0. 103 q 6 0<br />
matter of fact, the code would be exactly the same, just reading the parameters’<br />
values from different data files, with obvious advantages for software<br />
debugging and maintenance.<br />
Notice, that, for all the simulations the following conditions have been<br />
considered:<br />
• full degrees-of-freedom dynamic simulations;<br />
• detailed mathematical model used inthe simulation;<br />
• inaccurate initial parameters estimates used by the controller (about 15%<br />
for each parameter);<br />
• reduced order regressor used in the control law;<br />
• digital implementation of the control law (at asampling rate of 200 Hz);<br />
• quantization ofthe sensor outputs and measurement noise.<br />
Theonly significantsimplificationisthe neglect of thethruster dynamics that<br />
causes limit cycle in the vehicle behavior [300]. Itisworth remarking that the<br />
adaptive control law uses areduced number of dynamic parameters for each<br />
body: body mass and mass of displaced fluid (1 parameter), first moment<br />
of gravity and buoyancy (3 parameters). Those are the parameters that, in<br />
absence of current, can affect asteady state error. Thus, each vector ˆ θ i is<br />
composed of 4elements. In Chapter 3, adetailed analysis of adaptive/integral<br />
actions in presence of the ocean current isdiscussed.<br />
The desired end-effector trajectory is astraight line the projection of<br />
which onthe inertial axis isasegment of0. 2m.The line has tobeexecuted<br />
four times, with duration of the single trial of 4swith a5th order polynomial<br />
time law. Then, 14s of rest are imposed. The attitude of the end effector<br />
must be kept constant during the motion.<br />
The initial configuration is(see Figure 7.22):<br />
η =[0 0 0 0 0 0] T<br />
m, deg<br />
q =[0 180 0 0 90 180 ] T deg



