
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Techniek<br />
LRP<br />
gewoon op het kruisje in de rechter bovenhoek.<br />
Als de lader al ergens mee bezig is raak je gewoon<br />
het scherm op een willekeurige plek aan en dan<br />
krijg je de keuze, iets veranderen aan de instelling<br />
terwijl de lader ondertussen gewoon verder gaat<br />
waar hij mee bezig is, of stoppen en terugkeren<br />
naar het hoofdmenu.<br />
Info<br />
Laadstroom<br />
De maximale laadstroom van de Pulsar Touch is 12 ampère<br />
en dat is uiteraard iets waar ze bij LRP graag mee te<br />
koop lopen. Wat veel mensen echter niet beseffen is dat de<br />
laadstroom rechtstreeks in verbinding staat met het wattage<br />
van de lader. Daar is een eenvoudige rekensom voor,<br />
namelijk wattage van de lader gedeeld door het maximale<br />
voltage van de accu is de maximaal haalbare laadstroom<br />
van de lader, maar is nooit hoger dan de door de fabrikant<br />
ingestelde maximale laadstroom. Bij de LRP lader houdt<br />
dat in dat hij met zijn 140 watt zowel 1s als 2s LiPo’s met<br />
zijn maximale 12A kan laden. Bij 3s wordt dat ongeveer<br />
11A en bij 4s een goede 8A. Uiteraard zijn dat nog steeds<br />
goede waarden en heb je een flinke accu behoorlijk snel vol<br />
zitten, maar het blijft een staaltje misleiding waar vrijwel<br />
alle fabrikanten zich aan bezondigen.<br />
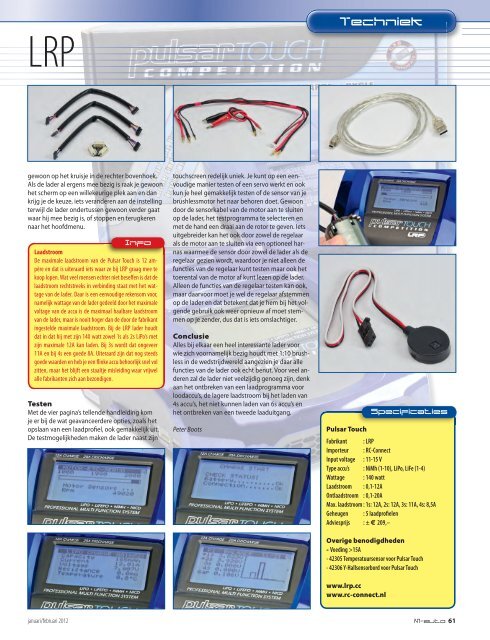
Testen<br />
Met de vier pagina’s tellende handleiding kom<br />
je er bij de wat geavanceerdere opties, zoals het<br />
opslaan van een laadprofiel, ook gemakkelijk uit.<br />
De testmogelijkheden maken de lader naast zijn<br />
touchscreen redelijk uniek. Je kunt op een eenvoudige<br />
manier testen of een servo werkt en ook<br />
kun je heel gemakkelijk testen of de sensor van je<br />
brushlessmotor het naar behoren doet. Gewoon<br />
door de sensorkabel van de motor aan te sluiten<br />
op de lader, het testprogramma te selecteren en<br />
met de hand een draai aan de rotor te geven. Iets<br />
uitgebreider kan het ook door zowel de regelaar<br />
als de motor aan te sluiten via een optioneel harnas<br />
waarmee de sensor door zowel de lader als de<br />
regelaar gezien wordt, waardoor je niet alleen de<br />
functies van de regelaar kunt testen maar ook het<br />
toerental van de motor af kunt lezen op de lader.<br />
Alleen de functies van de regelaar testen kan ook,<br />
maar daarvoor moet je wel de regelaar afstemmen<br />
op de lader en dat betekent dat je hem bij het volgende<br />
gebruik ook weer opnieuw af moet stemmen<br />
op je zender, dus dat is iets omslachtiger.<br />
Conclusie<br />
Alles bij elkaar een heel interessante lader voor<br />
wie zich voornamelijk bezig houdt met 1:10 brushless<br />
in de wedstrijdwereld aangezien je daar alle<br />
functies van de lader ook echt benut. Voor veel anderen<br />
zal de lader niet veelzijdig genoeg zijn, denk<br />
aan het ontbreken van een laadprogramma voor<br />
loodaccu’s, de lagere laadstroom bij het laden van<br />
4s accu’s, het niet kunnen laden van 6s accu’s en<br />
het ontbreken van een tweede laaduitgang.<br />
Peter Boots<br />
Pulsar Touch<br />
Fabrikant : LRP<br />
Importeur : RC-Connect<br />
Input voltage : 11-15 V<br />
Type accu’s : NiMh (1-10), LiPo, LiFe (1-4)<br />
Wattage : 140 watt<br />
Laadstroom : 0,1-12A<br />
Ontlaadstroom : 0,1-20A<br />
Max. laadstroom : 1s: 12A, 2s: 12A, 3s: 11A, 4s: 8,5A<br />
Geheugen : 5 laadprofielen<br />
Adviesprijs : ± € 209,–<br />
Overige benodigdheden<br />
- Voeding >15A<br />
- 42305 Temperatuursensor voor Pulsar Touch<br />
- 42306 Y-Hallsensorbord voor Pulsar Touch<br />
www.lrp.cc<br />
www.rc-connect.nl<br />
Specificaties<br />
januari/februari 2012<br />
M-<strong>auto</strong> 61