Praca - IPPT PAN
Praca - IPPT PAN
Praca - IPPT PAN

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.3. Metody wykorzystujace ˛ informacje o rozk̷ladach prawdopodobieństwa 39<br />
v ~<br />
u 2<br />
v n ′ ≡ v n<br />
∆ f<br />
v*<br />
h (v) = f (v)<br />
~<br />
– v n = 0<br />
v n = s (v)<br />
~<br />
0<br />
u 1<br />
∆ s<br />
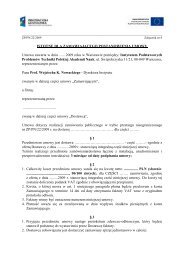
Rys. 2.12. Przybliżenie drugiego rzędu<br />
uk̷ladu [u], aby nowa oś v n ′ pokrywa̷la się z wektorem u∗ (zob. rys. 2.12). Transformacja<br />
ortogonalna opisujaca ˛ to przekszta̷lcenie ma postać<br />
V ′ = Q T U , (2.65)<br />
gdzie Q jest macierza˛<br />
transformacji n × n, której ostatnia˛<br />
kolumna˛<br />
jest wektor cosinusów<br />
kierunkowych α, dany wzorem (2.51), a pozosta̷le kolumny tworzone sa˛<br />
za pomoca˛<br />
odpowiednich metod ortogonalizacji, np. metody Grama-Schmidta [41]. Powierzchnia<br />
graniczna G(u) = 0 transformuje się na powierzchnię<br />
G v ′(v ′ ) = 0 , (2.66)<br />
dana˛<br />
w uk̷ladzie wspó̷lrzędnych [v ′ ] = [ṽ ′ , v n ′ ] = [v′ 1 , v′ 2 , . . .,v′ n−1 , v′ n ]. Równanie (2.66)<br />
rozwiazane ˛ względem v n ′ zapisać można jako<br />
v n ′ = f v ′(ṽ′ ) . (2.67)<br />
n−1<br />
{ }} {<br />
Punkt projektowy u ∗ transformuje się na punkt v ′∗ = Q T u ∗ = { 0, 0, . . ., 0, β}, gdzie<br />
β jest wskaźnikiem niezawodności danym przez (2.52). Paraboliczna aproksymacja powierzchni<br />
granicznej wokó̷l punktu v ′∗ ma postać<br />
v n ′ = f v ′(ṽ ′ ) ≈ s v ′(ṽ ′ ) = β + 1 ∑n−1<br />
n−1<br />
∑ ∂ 2 f v ′(ṽ ′ )<br />
∣<br />
2 ∂v<br />
iv<br />
i ′ ∂v′ j =0v ′ ′ ∣ṽ′ j = β + 1 2ṽ′T Hṽ ′ , (2.68)<br />
i=1<br />
j=1