Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...
Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...
Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
T E C H N I C K Á M E C H A N I K A<br />
───────────────────────────────────────────────────<br />
Statická a tvarová určitost<br />
p + 3 = 2S<br />
7 + 3 = 2 ·5<br />
10 = 10 … staticky a tvarově určitá soustava<br />
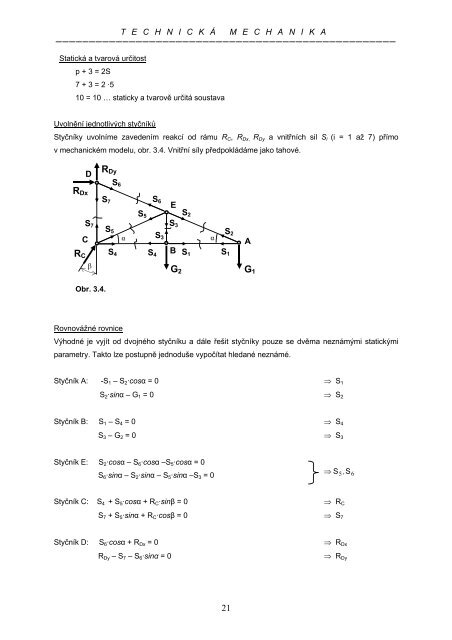
Uvolnění jednotlivých styčníků<br />
Styčníky uvolníme zavedením reakcí od rámu R C , R Dx, R Dy a vnitřních sil S i (i = 1 až 7) přímo<br />
v mechanickém modelu, obr. 3.4. Vnitřní síly předpokládáme jako tahové.<br />
R Dx<br />
D<br />
R Dy<br />
S 7<br />
S 6<br />
S 6<br />
E<br />
S<br />
S 2<br />
5<br />
S 7 S 3<br />
S 5<br />
C α S 3<br />
α<br />
S 2<br />
R C<br />
S 4 S 4<br />
B S 1 S 1<br />
β<br />
G 2<br />
A<br />
G 1<br />
Obr. 3.4.<br />
Rovnovážné rovnice<br />
Výhodné je vyjít od dvojného styčníku a dále řešit styčníky pouze se dvěma neznámými statickými<br />
parametry. Takto lze postupně jednoduše vypočítat hledané neznámé.<br />
Styčník A: -S 1 – S 2·cosα = 0 ⇒ S 1<br />
S 2·sinα – G 1 = 0 ⇒ S 2<br />
Styčník B: S 1 – S 4 = 0 ⇒ S 4<br />
S 3 – G 2 = 0 ⇒ S 3<br />
Styčník E: S 2·cosα – S 6·cosα –S 5·cosα = 0<br />
S 6·sinα – S 2·sinα – S 5·sinα –S 3 = 0<br />
⇒ S 5 , S 6<br />
Styčník C: S 4 + S 5·cosα + R C·sinβ = 0 ⇒ R C<br />
S 7 + S 5·sinα + R C·cosβ = 0 ⇒ S 7<br />
Styčník D: S 6·cosα + R Dx = 0 ⇒ R Dx<br />
R Dy – S 7 – S 6·sinα = 0<br />
⇒ R Dy<br />
21