Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...
Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...
Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
T E C H N I C K Á M E C H A N I K A<br />
───────────────────────────────────────────────────<br />
kde<br />
r<br />
A = ∫ F⋅dr<br />
r 0<br />
představuje práci, kterou vykonají působící síly mezi polohami r 0 a r .<br />
Aplikací věty získáme závislost v = f 4 (s).<br />
Poznámka: Všechny poznatky z kapitoly 7. je možno aplikovat v dynamice tělesa<br />
zanedbatelných rozměrů – hmotného bodu.<br />
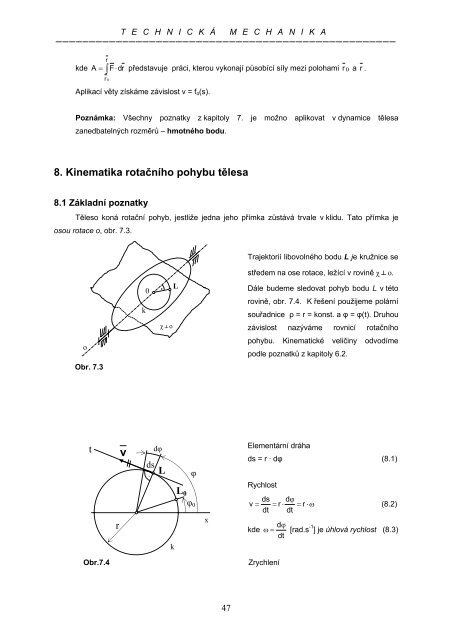
8. Kinematika rotačního pohybu tělesa<br />
8.1 Základní poznatky<br />
Těleso koná rotační pohyb, jestliže jedna jeho přímka zůstává trvale v klidu. Tato přímka je<br />
osou rotace o, obr. 7.3.<br />
Trajektorií libovolného bodu L je kružnice se<br />
středem na ose rotace, ležící v rovině χ ┴ o.<br />
k<br />
0<br />
•<br />
L<br />
Dále budeme sledovat pohyb bodu L v této<br />
rovině, obr. 7.4. K řešení použijeme polární<br />
souřadnice ρ = r = konst. a φ = φ(t). Druhou<br />
χ ┴ o<br />
závislost nazýváme rovnicí rotačního<br />
o<br />
pohybu. Kinematické veličiny odvodíme<br />
podle poznatků z kapitoly 6.2.<br />
Obr. 7.3<br />
t<br />
r<br />
v<br />
dφ<br />
ds<br />
· L<br />
k<br />
L 0<br />
φ<br />
φ 0<br />
x<br />
Elementární dráha<br />
ds = r · dφ (8.1)<br />
Rychlost<br />
ds dϕ<br />
v = = r ⋅ = r ⋅ω<br />
(8.2)<br />
dt dt<br />
dϕ<br />
kde ω = [rad.s -1 ] je úhlová rychlost (8.3)<br />
dt<br />
Obr.7.4<br />
Zrychlení<br />
47