Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...
Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...
Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
T E C H N I C K Á M E C H A N I K A<br />
───────────────────────────────────────────────────<br />
Řešení:<br />
y<br />
h<br />
D<br />
T 0<br />
T<br />
G<br />
a<br />
x<br />
N<br />
2<br />
l 2 l 1<br />
l<br />
N 1<br />
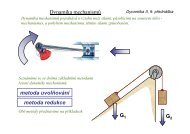
Podle dÁlembertova principu musí být tíha vozidla G , reakce N 1 , N 2 hnací síla adheze T 0<br />
a doplňková síla D v rovnováze.<br />
T 0 – D = 0<br />
D = m · a<br />
N 1 + N 2 – G = 0<br />
G = m · g<br />
G· l 1 + D· h – N 2·l = 0<br />
Maximální dosažitelné zrychlení vypočteme z adhezní síly na mezi prokluzu.<br />
T 0 = N 2 · f 0<br />
Výpočtem obdržíme<br />
f0<br />
⋅l1<br />
a = g⋅<br />
l − f0<br />
⋅h<br />
Poznámka: Řešení platí pokud N 1 ≥ 0.<br />
7.3. Věta o změně hybnosti, věta o změně kinetické energie<br />
Při řešení posuvného pohybu můžeme ve vybraných případech s výhodou využít větu o změně<br />
hybnosti, případně větu o změně kinetické energie.<br />
7.3.1. Věta o změně hybnosti<br />
Při odvození vyjdeme z pohybové rovnice (7.5).<br />
45