Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...
Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...
Ondrouch Jan: Technická mechanika - Vysoká Å¡kola báÅská ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
T E C H N I C K Á M E C H A N I K A<br />
───────────────────────────────────────────────────<br />
Má-li být vlákno v rovnováze za klidu, musí být splněny podmínky<br />
S 2<br />
S1<br />
a<br />
≤ e<br />
f α<br />
a<br />
S1<br />
S 2<br />
a<br />
≤ e<br />
f α<br />
resp.<br />
−f a<br />
α S2<br />
faα<br />
e ≤ ≤ e<br />
S1<br />
(5.10)<br />
5.6. Vliv tuhosti lan a řemenů<br />
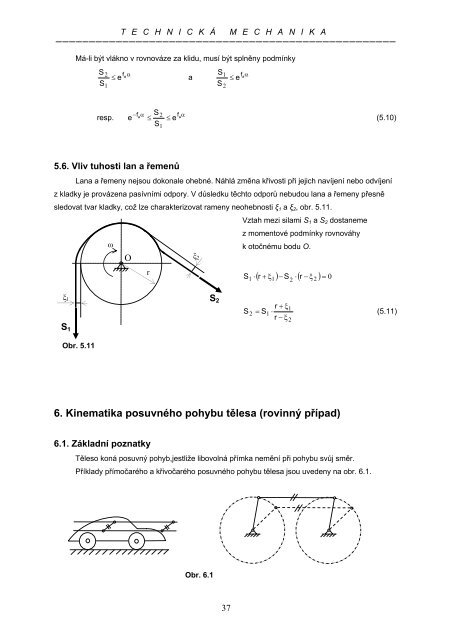
Lana a řemeny nejsou dokonale ohebné. Náhlá změna křivosti při jejich navíjení nebo odvíjení<br />
z kladky je provázena pasívními odpory. V důsledku těchto odporů nebudou lana a řemeny přesně<br />
sledovat tvar kladky, což lze charakterizovat rameny neohebnosti ξ 1 a ξ 2 , obr. 5.11.<br />
Vztah mezi silami S 1 a S 2 dostaneme<br />
z momentové podmínky rovnováhy<br />
ω<br />
k otočnému bodu O.<br />
O<br />
r<br />
S 2<br />
S 1<br />
ξ 1<br />
ξ 2<br />
Obr. 5.11<br />
( r + ξ ) − S ⋅( r − ξ ) 0<br />
S 1 ⋅ 1 2 2 =<br />
r + ξ1<br />
2 = S1<br />
⋅<br />
r − ξ2<br />
S (5.11)<br />
6. Kinematika posuvného pohybu tělesa (rovinný případ)<br />
6.1. Základní poznatky<br />
Těleso koná posuvný pohyb,jestliže libovolná přímka nemění při pohybu svůj směr.<br />
Příklady přímočarého a křivočarého posuvného pohybu tělesa jsou uvedeny na obr. 6.1.<br />
Obr. 6.1<br />
37