

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
7. Simulation der Umgebungserfassung anhand von Beispielszenarien<br />
Weltmodell instanziiert und verankert werden, sind ein Mikrowellenofen („MO.1“) sowie ein<br />
Teller („Pl.1“). Während der Aufgabenbearbeitung notwendige nichtphysikalische Objektinstanzen<br />
der Klasse „symbolisch repräsentierte subsymbolische Informationen“ sind in diesem<br />
Szenario die Relativpositionen GripperInFrontButton, GripperInFrontDoor und FreePlace-<br />
Pos. Durch die erfolgreiche Ausführung der aufgelisteten Vorgänge ist somit die Objektidentifikation<br />
wiederum abgeschlossen.<br />
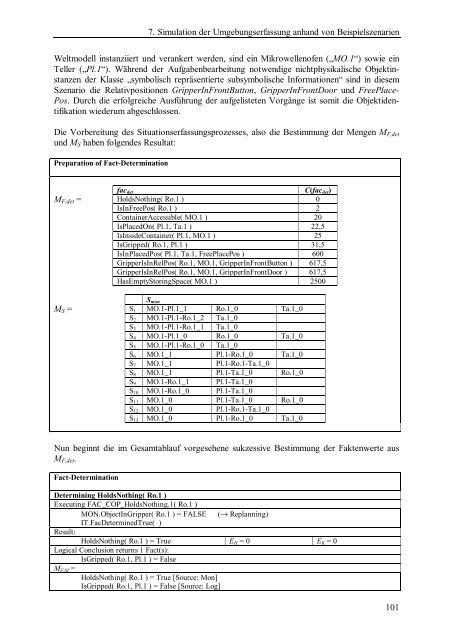
Die Vorbereitung des Situationserfassungsprozesses, also die Bestimmung der Mengen M F,det<br />
und M S haben folgendes Resultat:<br />
Preparation of Fact-Determination<br />
M F,det =<br />
M S =<br />
fac det C(fac det )<br />
HoldsNothing( Ro.1 ) 0<br />
IsInFreePos( Ro.1 ) 2<br />
ContainerAccessible( MO.1 ) 20<br />
IsPlacedOn( Pl.1, Ta.1 ) 22,5<br />
IsInsideContainer( Pl.1, MO.1 ) 25<br />
IsGripped( Ro.1, Pl.1 ) 31,5<br />
IsInPlacedPos( Pl.1, Ta.1, FreePlacePos ) 600<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontButton ) 617,5<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontDoor ) 617,5<br />
HasEmptyStoringSpace( MO.1 ) 2500<br />
S mon<br />
S 1 MO.1-Pl.1_1 Ro.1_0 Ta.1_0<br />
S 2 MO.1-Pl.1-Ro.1_2 Ta.1_0<br />
S 3 MO.1-Pl.1-Ro.1_1 Ta.1_0<br />
S 4 MO.1-Pl.1_0 Ro.1_0 Ta.1_0<br />
S 5 MO.1-Pl.1-Ro.1_0 Ta.1_0<br />
S 6 MO.1_1 Pl.1-Ro.1_0 Ta.1_0<br />
S 7 MO.1_1 Pl.1-Ro.1-Ta.1_0<br />
S 8 MO.1_1 Pl.1-Ta.1_0 Ro.1_0<br />
S 9 MO.1-Ro.1_1 Pl.1-Ta.1_0<br />
S 10 MO.1-Ro.1_0 Pl.1-Ta.1_0<br />
S 11 MO.1_0 Pl.1-Ta.1_0 Ro.1_0<br />
S 12 MO.1_0 Pl.1-Ro.1-Ta.1_0<br />
S 13 MO.1_0 Pl.1-Ro.1_0 Ta.1_0<br />
Nun beginnt die im Gesamtablauf vorgesehene sukzessive Bestimmung der Faktenwerte aus<br />
M F,det .<br />
Fact-Determination<br />
Determining HoldsNothing( Ro.1 )<br />
Executing FAC_COP_HoldsNothing.1( Ro.1 )<br />
MON.ObjectInGripper( Ro.1 ) = FALSE (→ Replanning)<br />
IT.FacDeterminedTrue( )<br />
Result:<br />
HoldsNothing( Ro.1 ) = True E H = 0 E K = 0<br />
Logical Conclusion returns 1 Fact(s):<br />
IsGripped( Ro.1, Pl.1 ) = False<br />
M F,SI =<br />
HoldsNothing( Ro.1 ) = True [Source: Mon]<br />
IsGripped( Ro.1, Pl.1 ) = False [Source: Log]<br />
101
