

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Anhang A<br />
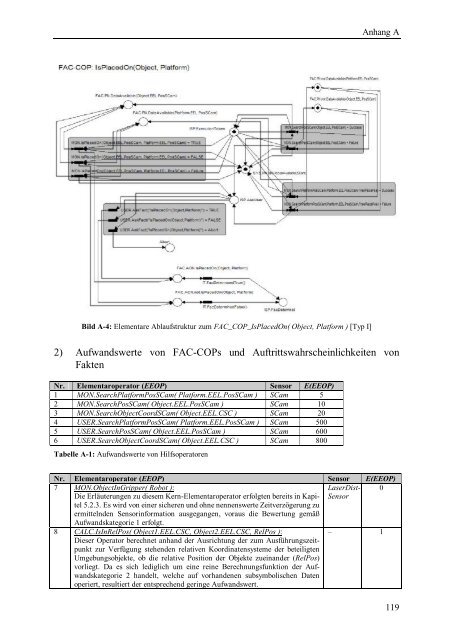
Bild A-4: Elementare Ablaufstruktur zum FAC_COP_IsPlacedOn( Object, Platform ) [Typ I]<br />
2) Aufwandswerte von FAC-COPs und Auftrittswahrscheinlichkeiten von<br />
Fakten<br />
Nr. Elementaroperator (EEOP) Sensor E(EEOP)<br />
1 MON.SearchPlatformPosSCam( Platform.EEL.PosSCam ) SCam 5<br />
2 MON.SearchPosSCam( Object.EEL.PosSCam ) SCam 10<br />
3 MON.SearchObjectCoordSCam( Object.EEL.CSC ) SCam 20<br />
4 USER.SearchPlatformPosSCam( Platform.EEL.PosSCam ) SCam 500<br />
5 USER.SearchPosSCam( Object.EEL.PosSCam ) SCam 600<br />
6 USER.SearchObjectCoordSCam( Object.EEL.CSC ) SCam 800<br />
Tabelle A-1: Aufwandswerte von Hilfsoperatoren<br />
Nr. Elementaroperator (EEOP) Sensor E(EEOP)<br />
7 MON.ObjectInGripper( Robot ):<br />
LaserDist- 0<br />
Die Erläuterungen zu diesem Kern-Elementaroperator erfolgten bereits in Kapitel<br />
5.2.3. Es wird von einer sicheren und ohne nennenswerte Zeitverzögerung zu<br />
ermittelnden Sensorinformation ausgegangen, voraus die Bewertung gemäß<br />
Aufwandskategorie 1 erfolgt.<br />
Sensor<br />
8 CALC.IsInRelPos( Object1.EEL.CSC, Object2.EEL.CSC, RelPos ):<br />
Dieser Operator berechnet anhand der Ausrichtung der zum Ausführungszeitpunkt<br />
zur Verfügung stehenden relativen Koordinatensysteme der beteiligten<br />
Umgebungsobjekte, ob die relative Position der Objekte zueinander (RelPos)<br />
vorliegt. Da es sich lediglich um eine reine Berechnungsfunktion der Aufwandskategorie<br />
2 handelt, welche auf vorhandenen subsymbolischen Daten<br />
operiert, resultiert der entsprechend geringe Aufwandswert.<br />
– 1<br />
119
