

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4. Anforderungen an Methoden zur teilautonomen Umgebungserfassung<br />
Schlägt die Identifikation eines Objektes fehl, da es sich z. B. nicht im aktuellen Sichtbereich<br />
des Stereokamerasystems befindet, so ist entsprechend dem Konzept der Teilautonomie der<br />
Benutzer zu konsultieren. Dieser kann dann über die Mensch-Maschine-Schnittstelle die<br />
Schwenk-Neige-Köpfe auf das fehlende Objekt ausrichten, so dass anschließend eine Objektidentifikation<br />
ermöglicht ist.<br />
Erfolgreiche und fehlgeschlagene Objektidentifikation<br />
Der Vorgang der Objektidentifikation und –verankerung ist so lange fortzusetzen, bis alle<br />
physikalischen Objekte der Ablaufstruktur (also die in der Menge M OI-phys enthaltenen Objekte)<br />
erfasst sind. Anschließend, und nur in diesem Fall, ist die Ermittlung der Initialsituation<br />
durch Bestimmung einer charakteristischen Faktenmenge möglich. Bevor die Anforderungen<br />
an die Situationserfassung durch Faktenbestimmung beschrieben werden, sind folgende Festlegungen<br />
einzuführen:<br />
Definition 4-1: Prädikat ”Object-Related Discrepancy“ (ORD [Sys/Env] )<br />
Ist weder die autonome noch die teilautonome Identifikation mindestens eines Objektes der in<br />
der abstrakten Ablaufstruktur PS A enthaltenen physikalischen Objekte möglich, so ist von<br />
einer Diskrepanz zwischen PS A und dem quasistatischen Umwelt- und Systemzustand<br />
ST Env,qstat auszugehen. Diese Form der Diskrepanz wird als objektbedingte Diskrepanz (object-related<br />
discrepancy) bezeichnet. Das Prädikat ORD wird im Diskrepanzfall mit TRUE<br />
bewertet, andernfalls mit FALSE. Es kann zwischen ORD Sys und ORD Env für System- und<br />
Umweltobjekte unterschieden werden.<br />
Definition 4-2: Prädikat ”Object Identification Successful“ (OIS)<br />
Die Objektidentifikation und –verankerung ist dann erfolgreich abgeschlossen, wenn sämtliche<br />
in PS A modellierten physikalischen Objektinstanzen identifiziert und im Weltmodell verankert<br />
wurden. Für die erfolgreiche Verankerung eines Objektes ist die Forderung 4-1 (Seite<br />
37) zu erfüllen. Das Prädikat OIS wird im Erfolgsfall mit TRUE bewertet, im anderen Fall mit<br />
FALSE. Somit gilt OIS = FALSE, wenn eine objektbedingte Diskrepanz vorliegt.<br />
4.2.2 Situationserfassung<br />
Sobald sämtliche Umweltobjekte erfolgreich im Sinne von Definition 4-2 identifiziert und<br />
verankert sind und somit OIS = TRUE gilt, kann die Situationserfassung beginnen. Hierfür<br />
soll zunächst verdeutlicht werden, auf Basis welcher Daten die Situationserfassung operiert.<br />
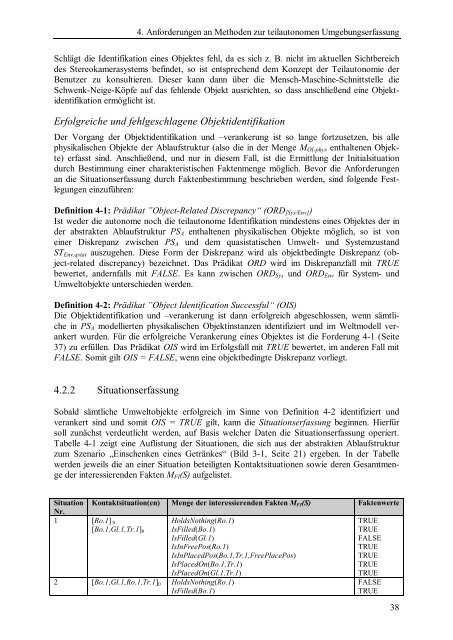
Tabelle 4-1 zeigt eine Auflistung der Situationen, die sich aus der abstrakten Ablaufstruktur<br />
zum Szenario „Einschenken eines Getränkes“ (Bild 3-1, Seite 21) ergeben. In der Tabelle<br />
werden jeweils die an einer Situation beteiligten Kontaktsituationen sowie deren Gesamtmenge<br />
der interessierenden Fakten M FI (S) aufgelistet.<br />
Situation Kontaktsituation(en) Menge der interessierenden Fakten M FI (S) Faktenwerte<br />
Nr.<br />
1 [Ro.1] 0<br />
[Bo.1,Gl.1,Tr.1] 0<br />
HoldsNothing(Ro.1)<br />
IsFilled(Bo.1)<br />
IsFilled(Gl.1)<br />
IsInFreePos(Ro.1)<br />
IsInPlacedPos(Bo.1,Tr.1,FreePlacePos)<br />
IsPlacedOn(Bo.1,Tr.1)<br />
IsPlacedOn(Gl.1,Tr.1)<br />
TRUE<br />
TRUE<br />
FALSE<br />
TRUE<br />
TRUE<br />
TRUE<br />
TRUE<br />
2 [Bo.1,Gl.1,Ro.1,Tr.1] 0 HoldsNothing(Ro.1)<br />
IsFilled(Bo.1)<br />
FALSE<br />
TRUE<br />
38
