

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
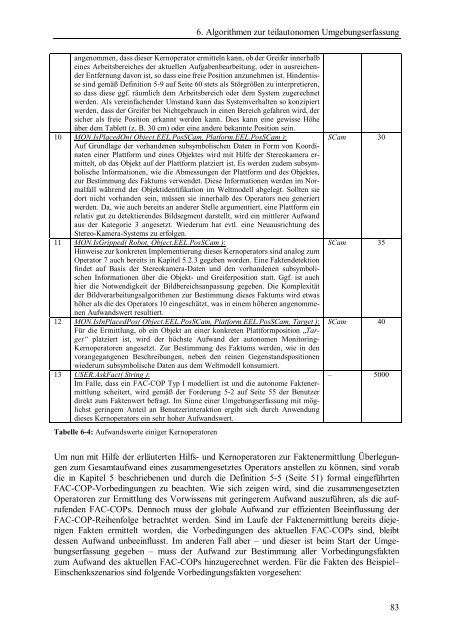
6. Algorithmen zur teilautonomen Umgebungserfassung<br />
angenommen, dass dieser Kernoperator ermitteln kann, ob der Greifer innerhalb<br />
eines Arbeitsbereiches der aktuellen Aufgabenbearbeitung, oder in ausreichender<br />
Entfernung davon ist, so dass eine freie Position anzunehmen ist. Hindernisse<br />
sind gemäß Definition 5-9 auf Seite 60 stets als Störgrößen zu interpretieren,<br />
so dass diese ggf. räumlich dem Arbeitsbereich oder dem System zugerechnet<br />
werden. Als vereinfachender Umstand kann das Systemverhalten so konzipiert<br />
werden, dass der Greifer bei Nichtgebrauch in einen Bereich gefahren wird, der<br />
sicher als freie Position erkannt werden kann. Dies kann eine gewisse Höhe<br />
über dem Tablett (z. B. 30 cm) oder eine andere bekannte Position sein.<br />
10 MON.IsPlacedOn( Object.EEL.PosSCam, Platform.EEL.PosSCam ):<br />
Auf Grundlage der vorhandenen subsymbolischen Daten in Form von Koordinaten<br />
einer Plattform und eines Objektes wird mit Hilfe der Stereokamera ermittelt,<br />
ob das Objekt auf der Plattform platziert ist. Es werden zudem subsymbolische<br />
Informationen, wie die Abmessungen der Plattform und des Objektes,<br />
zur Bestimmung des Faktums verwendet. Diese Informationen werden im Normalfall<br />
während der Objektidentifikation im Weltmodell abgelegt. Sollten sie<br />
dort nicht vorhanden sein, müssen sie innerhalb des Operators neu generiert<br />
werden. Da, wie auch bereits an anderer Stelle argumentiert, eine Plattform ein<br />
relativ gut zu detektierendes Bildsegment darstellt, wird ein mittlerer Aufwand<br />
aus der Kategorie 3 angesetzt. Wiederum hat evtl. eine Neuausrichtung des<br />
Stereo-Kamera-Systems zu erfolgen.<br />
11 MON.IsGripped( Robot, Object.EEL.PosSCam ):<br />
Hinweise zur konkreten Implementierung dieses Kernoperators sind analog zum<br />
Operator 7 auch bereits in Kapitel 5.2.3 gegeben worden. Eine Faktendetektion<br />
findet auf Basis der Stereokamera-Daten und den vorhandenen subsymbolischen<br />
Informationen über die Objekt- und Greiferposition statt. Ggf. ist auch<br />
hier die Notwendigkeit der Bildbereichsanpassung gegeben. Die Komplexität<br />
der Bildverarbeitungsalgorithmen zur Bestimmung dieses Faktums wird etwas<br />
höher als die des Operators 10 eingeschätzt, was in einem höheren angenommenen<br />
Aufwandswert resultiert.<br />
12 MON.IsInPlacedPos( Object.EEL.PosSCam, Platform.EEL.PosSCam, Target ):<br />
Für die Ermittlung, ob ein Objekt an einer konkreten Plattformposition „Target“<br />
platziert ist, wird der höchste Aufwand der autonomen Monitoring-<br />
Kernoperatoren angesetzt. Zur Bestimmung des Faktums werden, wie in den<br />
vorangegangenen Beschreibungen, neben den reinen Gegenstandspositionen<br />
wiederum subsymbolische Daten aus dem Weltmodell konsumiert.<br />
13 USER.AskFact( String ):<br />
Im Falle, dass ein FAC-COP Typ I modelliert ist und die autonome Faktenermittlung<br />
scheitert, wird gemäß der Forderung 5-2 auf Seite 55 der Benutzer<br />
direkt zum Faktenwert befragt. Im Sinne einer Umgebungserfassung mit möglichst<br />
geringem Anteil an Benutzerinteraktion ergibt sich durch Anwendung<br />
dieses Kernoperators ein sehr hoher Aufwandswert.<br />
Tabelle 6-4: Aufwandswerte einiger Kernoperatoren<br />
SCam 30<br />
SCam 35<br />
SCam 40<br />
– 5000<br />
Um nun mit Hilfe der erläuterten Hilfs- und Kernoperatoren zur Faktenermittlung Überlegungen<br />
zum Gesamtaufwand eines zusammengesetztes Operators anstellen zu können, sind vorab<br />
die in Kapitel 5 beschriebenen und durch die Definition 5-5 (Seite 51) formal eingeführten<br />
FAC-COP-Vorbedingungen zu beachten. Wie sich zeigen wird, sind die zusammengesetzten<br />
Operatoren zur Ermittlung des Vorwissens mit geringerem Aufwand auszuführen, als die aufrufenden<br />
FAC-COPs. Dennoch muss der globale Aufwand zur effizienten Beeinflussung der<br />
FAC-COP-Reihenfolge betrachtet werden. Sind im Laufe der Faktenermittlung bereits diejenigen<br />
Fakten ermittelt worden, die Vorbedingungen des aktuellen FAC-COPs sind, bleibt<br />
dessen Aufwand unbeeinflusst. Im anderen Fall aber – und dieser ist beim Start der Umgebungserfassung<br />
gegeben – muss der Aufwand zur Bestimmung aller Vorbedingungsfakten<br />
zum Aufwand des aktuellen FAC-COPs hinzugerechnet werden. Für die Fakten des Beispiel–<br />
Einschenkszenarios sind folgende Vorbedingungsfakten vorgesehen:<br />
83
