

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5. Datenstrukturen zur teilautonomen Umgebungserfassung<br />
nahezu beleuchtungsinvarianten Farbraumes (HSV – hue saturation value) in Komination mit<br />
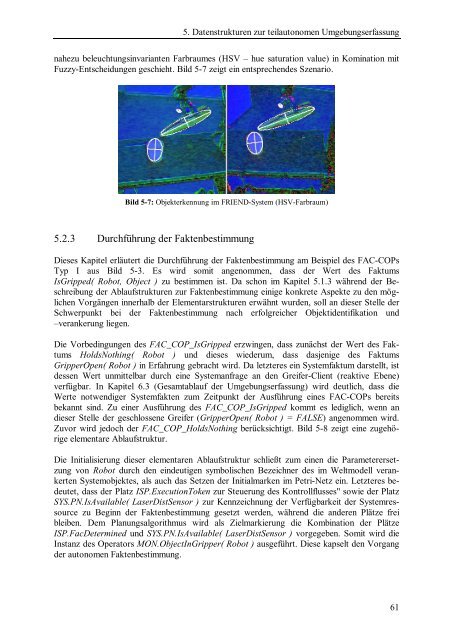
Fuzzy-Entscheidungen geschieht. Bild 5-7 zeigt ein entsprechendes Szenario.<br />
Bild 5-7: Objekterkennung im FRIEND-System (HSV-Farbraum)<br />
5.2.3 Durchführung der Faktenbestimmung<br />
Dieses Kapitel erläutert die Durchführung der Faktenbestimmung am Beispiel des FAC-COPs<br />
Typ I aus Bild 5-3. Es wird somit angenommen, dass der Wert des Faktums<br />
IsGripped( Robot, Object ) zu bestimmen ist. Da schon im Kapitel 5.1.3 während der Beschreibung<br />
der Ablaufstrukturen zur Faktenbestimmung einige konkrete Aspekte zu den möglichen<br />
Vorgängen innerhalb der Elementarstrukturen erwähnt wurden, soll an dieser Stelle der<br />
Schwerpunkt bei der Faktenbestimmung nach erfolgreicher Objektidentifikation und<br />
–verankerung liegen.<br />
Die Vorbedingungen des FAC_COP_IsGripped erzwingen, dass zunächst der Wert des Faktums<br />
HoldsNothing( Robot ) und dieses wiederum, dass dasjenige des Faktums<br />
GripperOpen( Robot ) in Erfahrung gebracht wird. Da letzteres ein Systemfaktum darstellt, ist<br />
dessen Wert unmittelbar durch eine Systemanfrage an den Greifer-Client (reaktive Ebene)<br />
verfügbar. In Kapitel 6.3 (Gesamtablauf der Umgebungserfassung) wird deutlich, dass die<br />
Werte notwendiger Systemfakten zum Zeitpunkt der Ausführung eines FAC-COPs bereits<br />
bekannt sind. Zu einer Ausführung des FAC_COP_IsGripped kommt es lediglich, wenn an<br />
dieser Stelle der geschlossene Greifer (GripperOpen( Robot ) = FALSE) angenommen wird.<br />
Zuvor wird jedoch der FAC_COP_HoldsNothing berücksichtigt. Bild 5-8 zeigt eine zugehörige<br />
elementare Ablaufstruktur.<br />
Die Initialisierung dieser elementaren Ablaufstruktur schließt zum einen die Parameterersetzung<br />
von Robot durch den eindeutigen symbolischen Bezeichner des im Weltmodell verankerten<br />
Systemobjektes, als auch das Setzen der Initialmarken im Petri-Netz ein. Letzteres bedeutet,<br />
dass der Platz ISP.ExecutionToken zur Steuerung des Kontrollflusses" sowie der Platz<br />
SYS.PN.IsAvailable( LaserDistSensor ) zur Kennzeichnung der Verfügbarkeit der Systemressource<br />
zu Beginn der Faktenbestimmung gesetzt werden, während die anderen Plätze frei<br />
bleiben. Dem Planungsalgorithmus wird als Zielmarkierung die Kombination der Plätze<br />
ISP.FacDetermined und SYS.PN.IsAvailable( LaserDistSensor ) vorgegeben. Somit wird die<br />
Instanz des Operators MON.ObjectInGripper( Robot ) ausgeführt. Diese kapselt den Vorgang<br />
der autonomen Faktenbestimmung.<br />
61
